35993 skryptE
IMPLEMENTACJA ALGORYTMÓW CYFROWEJ FILTRACJI ORTOGONALNEJ
Rys. 7.3.
% deklaracja rzędu parametryzacji Schura
N«40j
fxl) « genlT, 0.05.0.10,0.15.0.20) ; pauaej
Ix| - Btncj(xl,N);
[xc| *» cntr <x) ;
[xsl « 3tnd(xc);
(a.r.rho) ■ innov(xb,N); inp=randn(T,1);
(inpc) » cntr(inp);
(inps) » atnd(inpc);
(ee.rr.yl *> model (rho, inps) ;
(cx,ccx,nccx] ■ koral(x8,K);
(cy.ccy.nccy) » korel(y.K);
(Wx,wx) ■ wqmx(x9);
(Wy.wyl » wgmx(y);
subplot (2.3.1) ; płot(xa/max(xa)): orid; titleCa)’); subplot (2.3.2) ; plot (nccx. ccx/max (ccx) ) ; grid; titleCb) ')» subplot(2,3,3); plot<wx/pi,wx/max(Wx)); grid; titleCc)); subplot (2,3.4) ; plot (y/max(y) ) ; grid; title<’d)’); subplot (2.3. S) ; plot (nccy, ccy/max (ccy) ) ; grid; titLeCo)’); subplot(2.3.6) ; plot (wy/pi . Wy/max (Wy) > ; grid; titleCf)'):
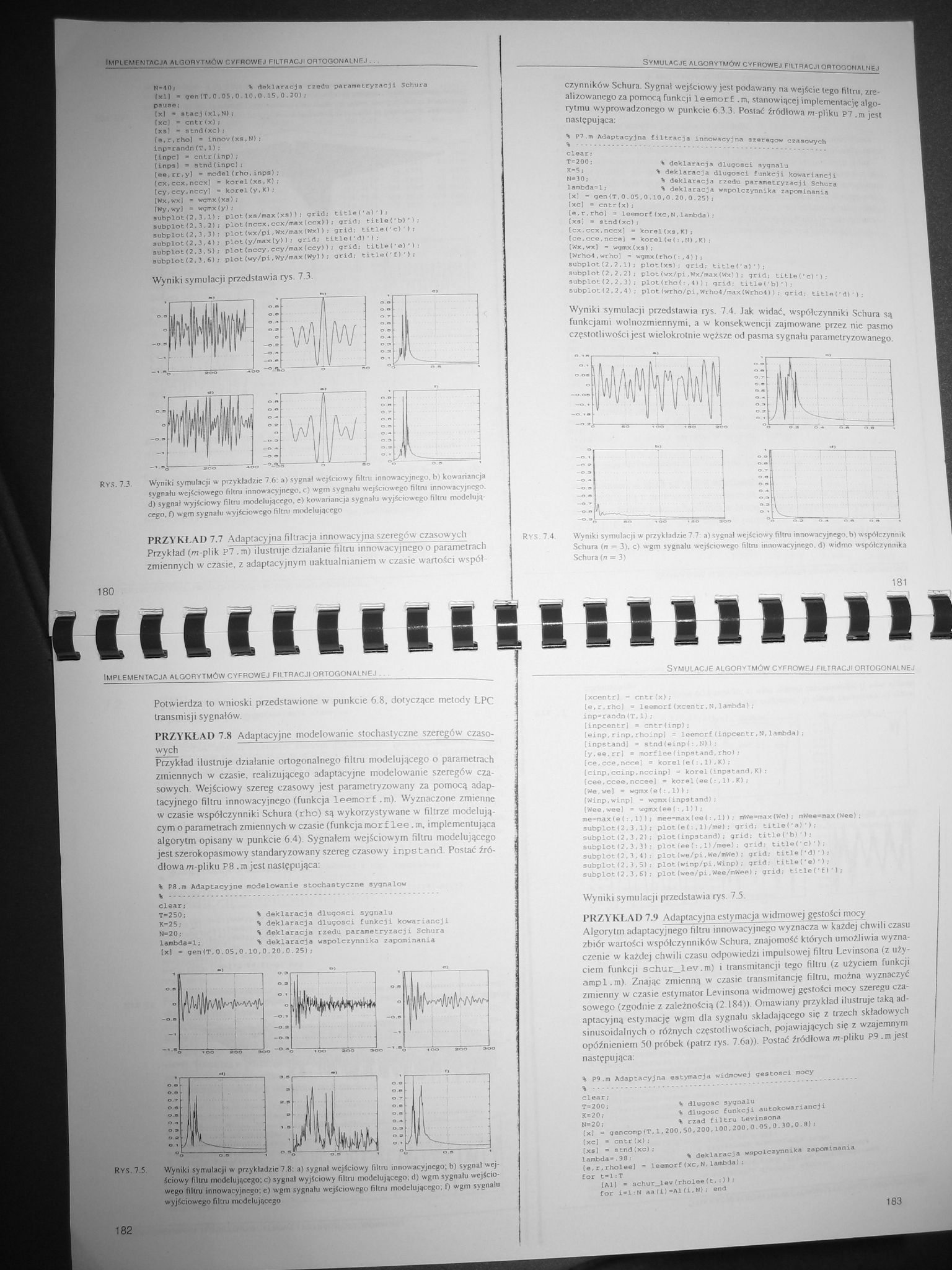
Wyniki symulacji przedstawia rys. 7.3.
Wyniki symulacji w przykładzie 7.6: a) sygnał wejściowy filtru innowacyjnego. bi kowariancja sygnału wejściowego filtru innowacyjnego, c) wgm sygnału wejściowego filtru innowacyjnego, d) sygnał wyjściowy filtru modelującego, e) kowariancja sygnału wyjściowego filtru modelują cego. 0 wgm sygnału wyjściowego filtru modelującego
PRZYKi VD7.7 \daptacyjna filtracja innov biegów czasowych
Przykład (m-plik P7 .m) ilustruje działanie filtru innowacyjnego o parametrach zmiennych w czasie, z adaptacyjnym uaktualnianiem w czasie wartości współ
rn-TRACJ, OBTOnn.m ... ,
" p,"'kd' 6 3 3-”-p'»" 7.‘ K
; filtr.ci. innow.oyin, „a!>owy<:h
elear; ......................
Te20Q •
Ka5. * ' deklaracja długości syqnalu
NOÓ. dlT’Cl fUnl"jl !'0“'"-iancn
1anbda=1; ,, dekt! . " P»r»m.try«ej1 Schura
W - h«n(T.o.o5.o.,o,n o 251* WBpolc*’™lk» »P««ln.ni,
(xcj - cntr (x) j
le.r.rho) = leemorf(xc,N,lambda)•
(xsj = 9tnd(xc);
(cx.ccx,nccx) = korel(xg.K); lce.ccc.ncce) - korel(eN),K>;
(Wx,wx) = wgmx(x9);
(Wrho4, wrhol 3 wqmx (rho (: , 4) ) j
subplot (2.2. l»; plot(xs) ; grid; titleCa)'):
3ubPl°t(2,2.2>; plot(wx/pi,Wx/max(Wxl); grid; title('c)')• subplot 2.2.3); plot < rho ( : . 4 ) ) : qrid: tUleCb)’), '
subplot (2.2,4) plot (wrho/pi , Wrho4/max (Wrhol) ) ; grid; titleCd)');
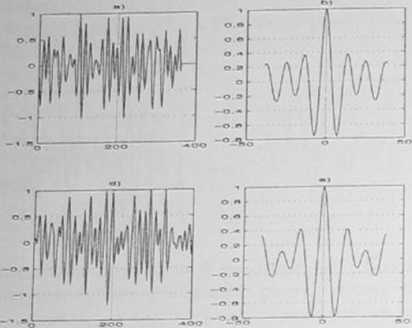
Wyn,k, symulacji pr7.eds.awia rys 7.4 Jak widać. wspńlczynniki Schura sa funkcjami wolnozmiennymi. a w konsekwencji zajmowane przez nie pasmo częstotliwości jest wielokrotnie węższe od pasma sygnału parametryzowanego.


Rys. 7 4
Wyniki symulacji w przykładzie 7.7 a) sygnał wejściowy filtru innowacyjnego, b) współczynnik Schura (n = 3). c) wgm sygnału wejściowego filtru innowacyjnego, d) widmo współczynnika Schura (n = 3)
181
inni
Implementacja algorytmów cyfrowej filtracji ortogonalne
Symulacje algorytmów cyfrowej filtracji ortogonalnej
Rys. 7.5
Potwierdza to wnioski przedstawione w punkcie 6.8. dotyczące metody LPC transmisji sygnałów.
PRZYKł M> 7.8 Adaptacyjne modelowanie stochastyczne szeregów czaso-wych
Przykład ilustruje działanie ortogonalnego filtru modelującego o parametrach zmiennych w czasie, realizującego adaptacyjne modelowanie szeregów cza sowych. Wejściowy szereg czasowy jest parametryzowany za pomocą adaptacyjnego filtru innowacyjnego (funkcja leemorf .m). Wyznaczone zmienne w czasie współczynniki Schura (rho) są wykorzystywane w filtrze modelują cym o parametrach zmiennych w czasie (funkcja mor f lee. m, implementująca algorytm opisany w punkcie 6.4). Sygnałem wejściowym filtru modelującego jest szerokopasmowy standaryzowany szereg czasowy inps tand Postać źródłowa m-pliku P8 .m jest następująca:
% P8.m Adaptacyjne modelowanie stochaetyczne sygnałów
% ...................................................
elear;
T°250; ł. deklaracja długości sygnału
K=25; % deklaracja długości funkcji kowariancji
N=20; % deklaracjo rzędu parametryzacji Schura
lambda=l; % deklaracja współczynnika zapominania
(x! - gentT.0.05,0.10,0.20,0.25);
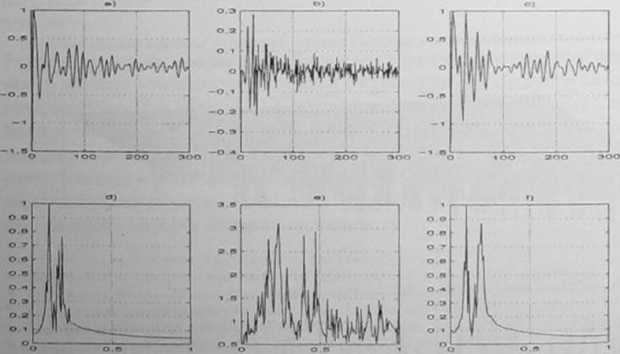
Wyniki symulacji w przykładzie 7.8: a) sygnał wejściowy filtru innowacyjnego; b) sygnał wejściowy filtru modelującego; c) sygnał wyjściowy filtru modelującego; d) wgm sygnału wejściowego filtru innowacyjnego; e) wgm sygnału wejściowego filtru modelującego; I ) wgm sygnału wyjściowego filtru modelującego
[xcentrj = cntr(x);
[e.r.rhol = leemorf(xcentr,M.lambda); inp=randn(T,1);
[inpcentrj 3 cntr(inp):
[einp,rinp,rhoinp] = leemorf(inpeentr,N,lambda);
[inpstandj = stnd(einp(:.N));
(y.ee.rr] = morflee(inpstand,rho);
[ce,cce,nccei = korel(e(:,1), K) ?
(einp,ccinp.nccinp] =* korel(inpstand,K);
[cee.ccee.nccee) = korel(ee1),K);
(We.weI = wgmx(e(:,1));
(Winp.winp] ■ wgmx{inpstand);
(Wee.wee) - wgmx(ee(:.l));
me-max(e(:,1)); mee=max(ee(:,I)); nWeamax(Wę); mWoe=max(Wee) ; subplot (2.3.1) ; plot (e (:, 1)/me) : grid; titleCa)'); subplot (2,3,2) ; plot (inpstand) ; grid; titleCb)'); subplot 12,3,3) ; plot (ee (: , 1)/mee) ; grid; titleCc)'); subplot (2,3,4) ; plot(we/pi.We/mWe); grid; titleCd)*); subplot (2,3,5) ; plot(winp/pi,Winp); grid; titleCe)'); subplot (2,3,6) ; plot (weo/pi . Wee/mWeel ; grid; titleCf)');
Wyniki symulacji przedstawia rys. 7.5.
PRZYKł.AD 7.9 Adaptacyjna estymacja widmowej gęstości mocy Algorytm adaptacyjnego filtru innowacyjnego wyznacza w każdej chwili czasu zbiór wartości współczynników Schura. znajomość których umożliwia wyznaczenie w każdej chwili czasu odpowiedzi impulsowej filtru Levinsona (z użyciem funkcji schur_lev.m) i transmitanćji tego filtru (z użyciem funkcji ampl.m) Znając zmienną w czasie transmitancję filtru, można wyznaczyć zmienny w czasie estymator Levinsona widmowej gęstości mocy szeregu czasowego (zgodnie z zależnością (2.184)). Omawiany przykład ilustruje taką adaptacyjną estymację wgm dla sygnału składającego się z trzech składowych sinusoidalnych o różnych częstotliwościach, pojawiających się z wzajemnym opóźnieniem 50 próbek (patrz rys. 7.6a)). Postać źródłowa /n-pliku P9 .m jest następująca: % P9.m Adaptacyjna estymacja widmowej gestosci mocy
% .................................................
% dlugosc sygnału
dlugosc funkcji autokowariancji * rząd filtru Lovin9ona
gancomptr,1.200.50.200, 100.200.0.05,0.30.0.8);
• cntr(x)j
% doklnracj* «,pol=»ym>ik» zopomin.ni.
for t“l:T
(AJ) 3 achur_lev(rholee(c.:) l ;
for i»l:N aa(i)=A1(i.N); end
182
183
Wyszukiwarka
Podobne podstrony:
35993 skryptE IMPLEMENTACJA ALGORYTMÓW CYFROWEJ FILTRACJI ORTOGONALNEJ Rys. 7.3. % deklaracja rzędu
skryptE IMPLEMENTACJA ALGORYTMÓW CYFROWEJ FILTRACJI ORTOGONALNEJ Rys. 7.3. % deklaracja rzędu parame
87139 skryptC Rys. 7 i7. Implementacja algorytmów cyfrowej filtracji ortogonalnej w środowisku
Zdjęcie0293 IMPLEMENTACJA ALGORYTMÓW CYFROWEJ FILTRACJI ORTOGONALNE o s • O tft . o o» ov-mm Symulac
26314 skryptD Implementacja algorytmów cyfrowej filtracji
79319 skryptF Rys. 7 6. iMri FMEMTACJĄ ALGORYTMÓW CYFROWEJ FILTRACJI ORTOGONALNEJ Wyniki symulacji w
55584 Zdjęcie0291 (2) *-<0; ALGORYTMÓW CYfROWtj FILTRACJI ORTOGONALNE.. % 4aHiax*c;* rc*0t p*ri r
35709 Zdjęcie0297 Implementacja aigopytmOw cyfrowej filtracji ortogonalne. for n-t-.K «it. v*l >«
68618 Zdjęcie0285 (4) Implementacja algorytmów cyfrowej filtracji
61229 Zdjęcie0295 (2) implementacja algorytmów cyfrowej fu.tracj ortogonalne- ^ dc ? t aooY ch H kZ
więcej podobnych podstron