79319 skryptF
Rys. 7 6.
iMri FMEMTACJĄ ALGORYTMÓW CYFROWEJ FILTRACJI ORTOGONALNEJ

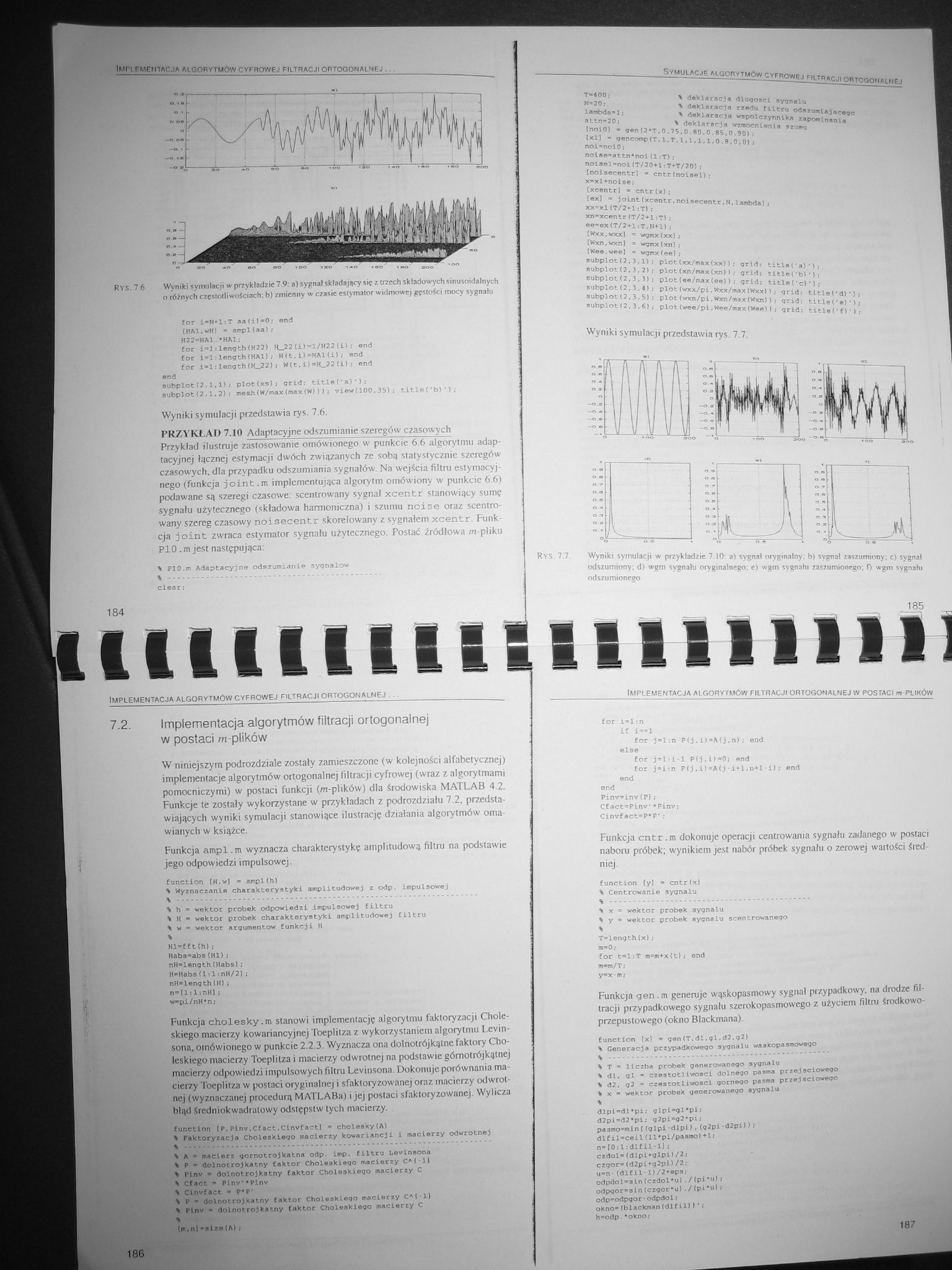
Wyniki symulacji w przykładzie 7 Q: a) sygnał składający się z trzech składowych sinusoidalnych o różnych częstotliwościach; b) zmienny w czasie estymator widmowej gęstości mocy sygnału
for i=N+l:T aa(i)=0: end (HAl.wH) = ampl(aa);
H22=HA1 .* HA1;
for i=l:length(H22) H_J22 (i) =1/H22 (i) ; end for 1=1:length(HA1); H(t.i)=HA1(i); end for i=l:length(H_22); W(t,i)=H_22(i); end
end
subplot (2,1,1); plot (xs) ; grid: titleCa)*):
subplot(2,1,2)z mesh(W/max(max(W))); view{100.35); title(*b)');
Wyniki symulacji przedstawia rys 7.6.
PRZYKł U) 7.10 Adaptacyjne odszumianie szerc
Przykład ilustruje zastosowanie omówionego w punkcie 6.6 algorytmu adaptacyjnej łącznej estymacji dwóch związanych ze sobą statystycznie szeregów czasou-ych, dla przypadku odszumiania sygnałów Na wejścia filtru estymacyj-nego (funkcja joint.m implementująca algorytm omówiony w punkcie 6.6) podawane są szeregi czasowe, scentrowany sygnał xcentr stanowiący sumę sygnału użytecznego (składowa harmoniczna) i szumu noise oraz scenlro-wany szereg czasowy noisecentr skorelowany z sygnałem xcentr Funkcja joint zwraca estymator sygnału użytecznego. Postać źródłowa m pliku PI0 . m jest następująca:
% PIO.m Adaptacyjne odszumianie sygnałów
\ ...........................................
elear;
RYS. 7.7
J57MULACJE MGOnYTMÓW r.»cn™.,.______
-—--ortoqomai mc ,
' -nuoo«l „y,nalu
'.laracja rzędu filtru
T-400; ,
N*20:
lambdami; .
!r*°i
noise=attn*noi(1:T); noiael=«noi (T/20+1 :T+T/20) •
(noisecentr] - entrtnoiaei); x»xl+noise;
(xcentrl = cntr(x);
«*xUT/2^:Tnentr'n0l"C*ntr,N' ’ambdi° ‘
xn=xcentr(T/2+l:T);
ee»ex(T/2+l:T,N+l);
[Wxx.wxxł ~ wgmxlxx>;
(Wxn,wxn) = wqmx(xn);
(W*«.wee) „ vgmx(ee);
subpl°t(2.3.1>; plot (xx/max (xx) ) ; grid; titleCalM.
subpiot(J:!:*!; piot!^x!ee!!; lllt tuie!’c!*!;
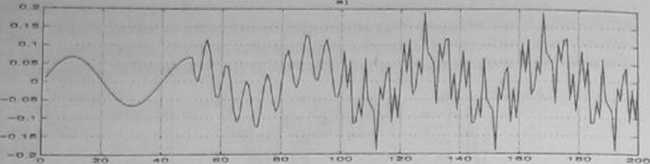
Wyniki symulacji przedstawia rys. 7.7.


X
Wyniki symulacji w przykładzie 7.10 a) sygnał oryginalny; b) sygnał zaszumiony; c) sygnał odszumiony; d) wgm sygnału oryginalnego; e) wgm sygnahi zaszumionego; f) wgm sygnału
odszumionego

Implementacja algorytmów filtracji ortogonalnej w postaci m-PLiKów
184
liitlillii
Implementacja algorytmów cyfrowej filtracji ortogonalnej_________
7.2.
Implementacja algorytmów filtracji ortogonalnej w postaci m-plików
W niniejszym podrozdziale zostały zamieszczone (w kolejności alfabetycznej) implementacje algorytmów ortogonalnej filtracji cyfrowej (wraz z algorytmami pomocniczymi) w postaci funkcji (m-plików) dla środowiska MAT LAB 4.2. Funkcje te zostały wykorzystane w przykładach z podrozdziału 7.2. przedstawiających wyniki symulacji stanowiące ilustrację działania algorytmów omawianych w książce.
Funkcja ampl.m wyznacza charakterystykę amplitudową filtru na podstawie jego odpowiedzi impulsowej.
function tH,w) = ampl(h)
\ Wyznaczanie charakterystyki amplitudowej z odp. impulsowej
% ..............................................................
\ h ® wektor próbek odpowiedzi impulsowej filtru li H = wektor próbek charakterystyki amplitudowej filtru li w =- wektor argumentów funkcji H *
Hl*Cft(h);
Habs°abs(HI); nH=length(Habs);
H*Habs(1:1:nH/2}; nH*length(H); n=(1s1;nH)i w*pi/nH*n;
Funkcja cholesky.m stanowi implementację algorytmu faktoryzacji Chole-skiego macierzy kowariancyjnej Toeplitza z wykorzystaniem algorytmu I cvin-sona, omówionego w punkcie 2.2.3. Wyznacza ona dolnotrójkątne faktory Cho-leskiego macierzy Toeplitza i macierzy odwrotnej na podstawie górnotrójkątnej macierzy odpowiedzi impulsowych filtru Levinsona. Dokonuje porównania macierzy Toeplitza w postaci oryginalnej i sfaktoryzowanej oraz macierzy odwrotnej (wyznaczanej procedurą MATLABa) i jej postaci sfaktoryzowanej. Wylicza błąd średnlokwadratowy odstępstw tych macierzy.
function (P,Pinv.Cfact,Cinvfact) * cholesky(A)
% Faktoryzacja Choloskiego macierzy kowariancji i macierzy odwrotnej
* ..............................................................
% A = macierz qornotrojkatna odp. imp. filtru Levinaona ^ P » dolnotrojkatny faktor Choleskiego macierzy CM 1)
Pinv ■ dolnotrojkatny faktor Choleskiego macierzy C \ Cfact «* Pinv,łPinv % Clnvfact ■ P*P'
\ p • dolnotrojkatny faktor Choleskiego macierzy CM-lJ % Pinv = dolnotrojkatny faktor Choleskiego macierzy C \
lm.nl-sizetA);
for i=l:n if i==l
for j=l:n P<j,i)=A(j,n); end else
for j ■= 1: i -1 P(j,i)»0; end
for j=i;n P(j,i)=A(j-i+l,n+l-ił; end
end
end
Pinv=inv{p);
Cfact=Pinv *Pinv;
Cinvfact=P*P* ;
Funkcja cntr.m dokonuje operacji centrowania sygnału zadanego w postaci naboru próbek; wynikiem jest nabór próbek sygnału o zerowej wartości śred niej.
function [yj » cntr(x)
% Centrowanie sygnału
% ............................................
ł x = wektor próbek sygnału
% y = wektor próbek sygnału scentrowanego
%
T=length(x); m=0;
for t»l:T m=m+x(t); end
m=m/T;
y=x-m;
Funkcja gen.m generuje wąskopasmowy sygnał przypadkowy, na drodze filtracji przypadkowego sygnału szerokopasmowego z użyciem filtru środkowo-przepustowego (okno Blackmana).
function (xl « gen(T.dl.gl.d2.g2>
Generacja przypadkowego sygnału wąskopasmowego
% .................................................
% T - liczba próbek generowanego sygnału % dl, gl » częstotliwości dolnego Dnsmn przejściowego % d2, q2 = czestotIlości gorneqo pasma przejściowego > x o wektor próbek generowanego sygnału %
dlpi-dl*pi; glpi=*gl*pi; d2pi-d2«pi; g2pi*«2*pi; pasmo^min { (glpi-dlpi),(g2pi-d2pi)); dlfil°ceil(11*pi/pasmo)♦li n«[0:1:dl Cii -1J; czdol=(dlpi+glpi)/2; czgor = (d2pi-*-q2pi) /2 ; u«n • (dlfil- l)/2«-eps; odpdol =»3in (czdol *u) ./(pi*u) r odpgor^sin(czgor*u)./(pi*u) i Odp-odpgor•odpdol: okno*(blackman(dlfil)) ' * h«odp.‘okno;
186
Wyszukiwarka
Podobne podstrony:
87139 skryptC Rys. 7 i7. Implementacja algorytmów cyfrowej filtracji ortogonalnej w środowisku
skryptE IMPLEMENTACJA ALGORYTMÓW CYFROWEJ FILTRACJI ORTOGONALNEJ Rys. 7.3. % deklaracja rzędu parame
35993 skryptE IMPLEMENTACJA ALGORYTMÓW CYFROWEJ FILTRACJI ORTOGONALNEJ Rys. 7.3. % deklaracja rzędu
35993 skryptE IMPLEMENTACJA ALGORYTMÓW CYFROWEJ FILTRACJI ORTOGONALNEJ Rys. 7.3. % deklaracja rzędu
Zdjęcie0293 IMPLEMENTACJA ALGORYTMÓW CYFROWEJ FILTRACJI ORTOGONALNE o s • O tft . o o» ov-mm Symulac
55584 Zdjęcie0291 (2) *-<0; ALGORYTMÓW CYfROWtj FILTRACJI ORTOGONALNE.. % 4aHiax*c;* rc*0t p*ri r
26314 skryptD Implementacja algorytmów cyfrowej filtracji
68618 Zdjęcie0285 (4) Implementacja algorytmów cyfrowej filtracji
35709 Zdjęcie0297 Implementacja aigopytmOw cyfrowej filtracji ortogonalne. for n-t-.K «it. v*l >«
43576 skrypt) Liniowa cyfrowa filtracja odszumiająca sygnałów (5.1) n(r) Rys. 5.1 Idealna filtracja
więcej podobnych podstron