77531 Untitled Scanned 11
- 22 -
- odporność na zakłócenia przy przesyłaniu informacji i niezawodność urządzeń jest z reguły większa niż w przypadku urządzeń analogowych,
- istnieje możliwość kontroli błędów powstałych przy przekazywaniu i przetwarzaniu informacji,
- informacja cyfrowa może być łatwo zapamiętana i magazynowana przez dowolnie długi czas (nie występuje zjawisko utraty informacji z upływem czasu jak to ma miejsce w urządzeniach analogowych),
- istnieje możliwość dokładnego przedstawiania informacji wyjściowych za pomocą wskaźników cyfrowych i urządzeń drukujących; związane jest to z łatwością odczytywania wartości sygnałów i wyeliminowaniem mierników analogowych,
- możliwość odtwarzania przebiegu sygnałów dyskretnych w dowolnej skali czasu,
- powtarzalność właściwości układów pełniących to samo zadanie; możliwość wymiany urządzenia lub fragmentu urządzenia na nowe bez konieczności dostrajania, Jak w przypadku układów analogowych.
Wadami urządzeń cyfrowych są:
- wyższy koszt niż analogicznych urządzeń analogowych w przypadku przetwarzania informacji z niewielką dokładnością,
- dłuższy czas wykonywania złożonych operacji.
0 wyborze techniki realizacji układu sterowania decyduje szereg czynników technicznych i ekonomicznych, które nie będą omawiane.
W zależności od środków technicznych wykorzystywanych do budowy cyfrowych układów sterujących, problematykę techniki cyfrowej w automatyce podzielić można na cztery grupy zagadnień obejmujące:
- układy budowane z bramek i przerzutników (elementów o małej skali integracji),
- układy budowane z bloków funkcjonalnych (elementów o średniej skali integracji),
- układy budowane z zespołów funkcjonalnych (elementów o wielkiej skali integracji),
- sterowanie z wykorzystaniem komputerów.
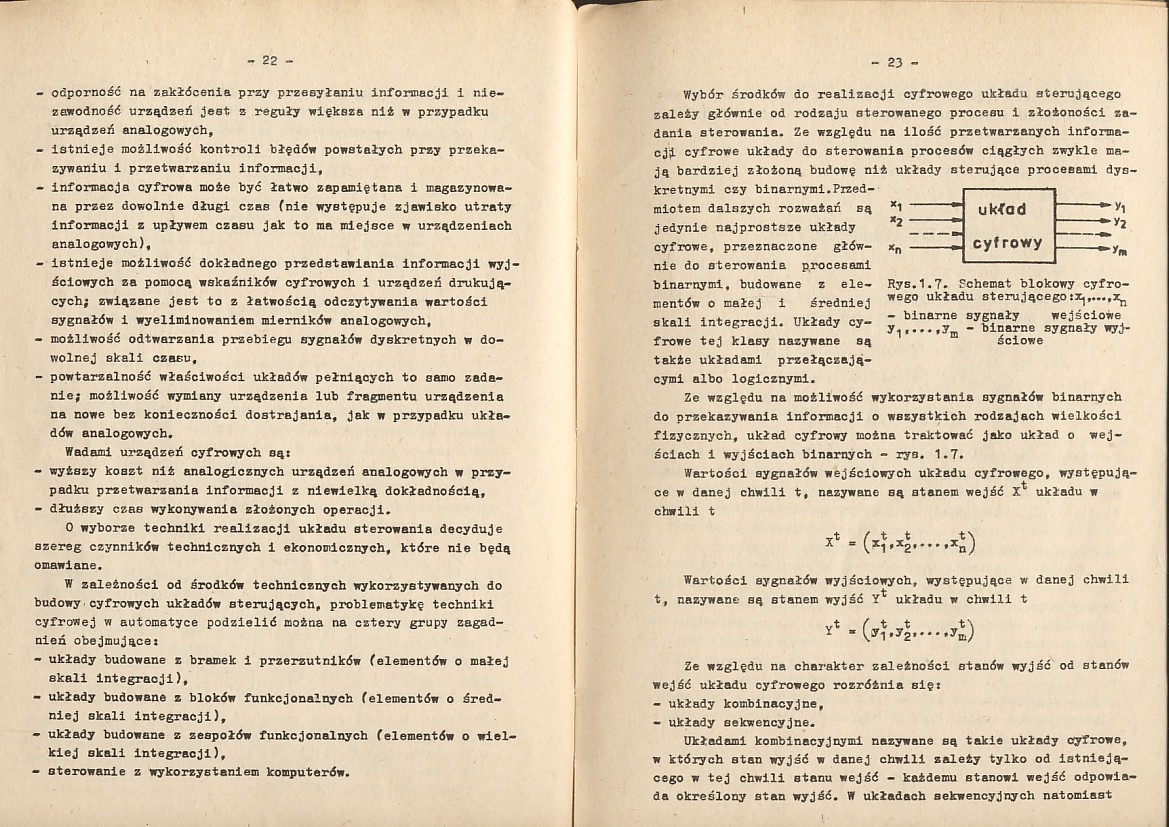
Wybór środków do realizacji cyfrowego układu sterującego zależy głównie od rodzaju sterowanego procesu i złożoności zadania sterowania. Ze względu na ilość przetwarzanych informacji cyfrowe układy do sterowania procesów ciągłych zwykle mają bardziej złożoną budowę niż układy sterujące procesami dyskretnymi czy binarnymi.Przed-miotem dalszych rozważań są jedynie najprostsze układy cyfrowe, przeznaczone głównie do sterowania procesami binarnymi, budowane z elementów o małej i średniej skali integracji. Układy cyfrowe tej klasy nazywane są także układami przełączającymi albo logicznymi.
*1
*2
|
układ | ||
|
cyfrowy | ||
*1
*2
Rys.1.7. Schemat blokowy cyfrowego układu sterującego:^,...,^
- binarne sygnały wejściowe y1t...,7m - binarne sygnały wyj
ściowe
Ze względu na możliwość wykorzystania sygnałów binarnych do przekazywania informacji o wszystkich rodzajach wielkości fizycznych, układ cyfrowy można traktować jako układ o wejściach i wyjściach binarnych - rys. 1.7.
Wartości sygnałów wejściowych układu cyfrowego, występujące w danej chwili t, nazywane są stanem wejść X* układu w chwili t
X
t



Wartości sygnałów wyjściowych, występujące w danej chwili t, nazywane są stanem wyjść Y* układu w chwili t

Ze względu na charakter zależności stanów wyjść od stanów wejść układu cyfrowego rozróżnia się:
- układy kombinacyjne,
- układy sekwencyjne.
Układami kombinacyjnymi nazywane są takie układy cyfrowe, w których stan wyjść w danej chwili zależy tylko od istniejącego w tej chwili stanu wejść - każdemu stanowi wejść odpowiada określony stan wyjść. W układach sekwencyjnych natomiast
Wyszukiwarka
Podobne podstrony:
4Rys. 8.2. Charakterystyka przejściowa dla R0 = Rc Ml — odporność na zakłócenia przy niskim
5 Uwe[v] Rys. 8.2. Charakterystyka przejściowa dla R0 = Rc Ml — odporność na zakłócenia przy niskim
4Rys. 8.2. Charakterystyka przejściowa dla R0 = Rc Ml — odporność na zakłócenia przy niskim
Rys. 8.3. Metody zwiększenia odporności na zakłócenia przy niskim stanie
Untitled Scanned 11 (14) Zestaw III 1. Ręce oparte na dwóch taboretach — uniesieni
Untitled Scanned 11 (8) PISOWNIA WYRAZÓW Z em ; en om on! on — piszemy bez względu na wymowę 4
Untitled Scanned 11 (9) II.ROZRÓŻNIENIE MAŁŻEŃSTW ZE WZGLĘDU NA CZAS TRWANIA 1. ZWIĄZKI TRWAŁE Małże
Untitled Scanned 82 - 166 pokazłanj na rys,6.11. W układzie tym, pamięć RAM-1 zastępuje zespół demul
Untitled Scanned 11 (14) Zestaw III 1. Ręce oparte na dwóch taboretach — uniesieni
Image589 Schmitta, to odporność na zakłócenia wzrasta i wynosi 1 V dla poziomu 0, a 1,3 Vdla poziomu
Zalety sieci budowanych w oparciu o światłowody: * pełna odporność na zakłócenia
DYNAMICZNY DOSTĘP DO WIDMA JAKO ELEMENT ZWIĘKSZAJĄCY ODPORNOŚĆ NA ZAKŁÓCENIA WOJSKOWYCH SYSTEMÓ
więcej podobnych podstron