16
!* V\»
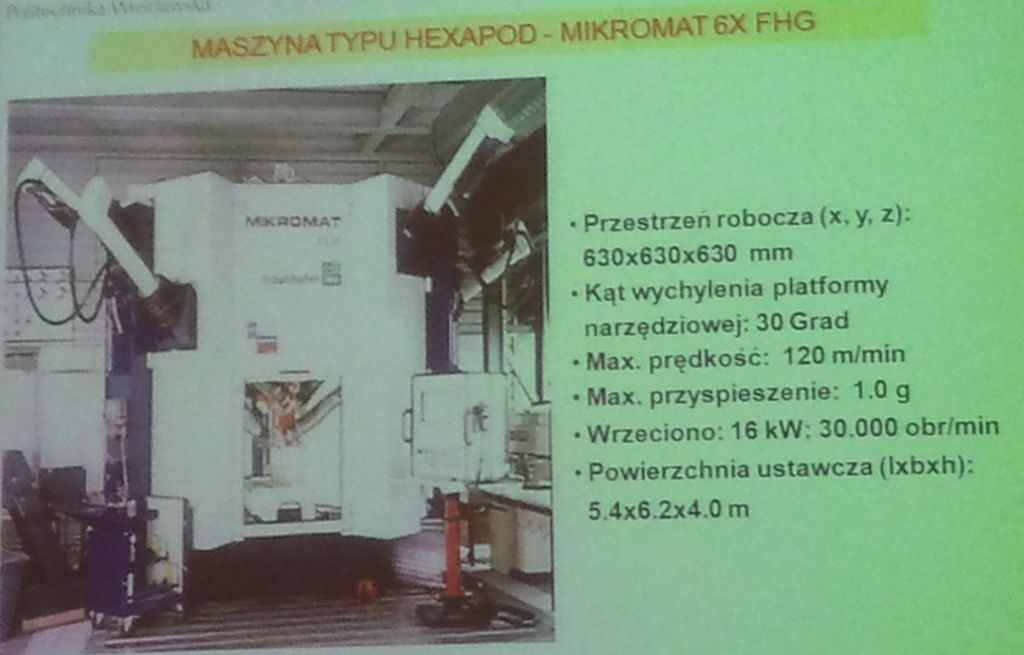
MASZYNA TYPU HEXAPOD

MłKROMAT 6X FHG
• Przestrzeń robocza (x. y, z): 630x630x630 mm
• Kąt wychylenia platformy narzędziowej: 30 Grad
• Max. prędkość: 120m/min
• Max. przyspieszenie: 1.0 g
• Wrzeciono: 16 kW: 30.000 obr/min
• Powierzchnia ustawcza (łxbxh):
5 4x6.2x4 0 m
Wyszukiwarka
Podobne podstrony:
MASZYNA TYPU HEXAPODMIKROMAT 6X FHG • Przestrzeń robocza (x. y. z): 630x630x6
PRZYKŁAD MASZYNY TYPU HEXAPOD fO KINEMATYCE RÓWNOLEGŁEJ)Heapod FELIX - parametr} techniczne 1’rzeNtr
PRZYKŁAD MASZYNY TYPU HEXAPOD fO KINEMATYCE RÓWNOLEGŁEJ)Heapod FELIX - parametr} techniczne 1’rzeNtr
DSC08409 Sprężarka śrubowa maszyna typu wyporowego komora sprężania Jest przestrzenią utworzoną
funkcji i me wchodzą w skład przestrzeni roboczej Matlaba. Z poziomu funkcji me ma dostępu do zmienn
Edycja Element Ustawienia Palety Narzędzia Przestrzeń robocza Okno MK2005 Pomoc
HPIM0768 Budowa robolów przemysłowych Rysunek 3.7 . Przestrzeń robocza manipulator
drewnianych może byc uskutecznione ręka lub maszyną; rozmiary ich zalezą od przestrzeni jaka ma byc
P3020269 1000 • Funkcja elear usuwa wszystkie zmienne z przestrzeni roboczej; •
gdy przestrzeń robocza pełnej sprawności składa się z tych punktów, które manipulator może osiągnąć
040 5 ciśnieniu średnim równym średniemu ciśnieniu w przestrzeni roboczej silnika. Objętość przestrz
093 5 Rys. 3.11. Przebieg zmian temperatury gazu w przestrzeni roboczej silnika; i = 13, T = 800 K.
źródłem zanieczyszczenia środowiska. Podobnie działa wprowadzenie do przestrzeni roboczej pieca węgl
19111 P1220452 Obiegi z doładowaniem Doładowanie wytworzenie w przestrzeni roboczej zwiększonego ciś
więcej podobnych podstron