26158 instalacje135

5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 150
5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 150

Rys. 5.7. Przekrój poprzeczny dwupakieto-wego silnika skokowego o wirniku reluk-tancyjnym z fragmentem strefy czynnej (wg [101])
1 — uzwojenie; 2 — pakiet wirnika wego, reluktancyjnego silnika skokowego o wzbudzeniu homopolarnym, zrealizowanym za pomocą pierścieniowej cewki (rys. 5.7).
Na wejściu programu powinny wystąpić następujące wielkości: kąt skoku, częstotliwość, moment wyjściowy, liczba pasm, cyklogram komutacji i indukcja magnetyczna nasycenia. Program oblicza i drukuje wymiary silnika, na podstawie których sporządza się rysunki i można silnik wyprodukować. Zastosowano procedurę obliczania krok po kroku.
Na podstawie ogólnej teorii przyjmuje się punkt A na krzywej B-H materiału magnetycznego. Dla tego punktu A określa się średni
|
moment obrotowy | |
|
„ 00 M=A-f |
(5.15) |
|
gdzie: | |
|
f At — A2 |
(5.16) |
0 — przepływ;
0 — strumień magnetyczny; <5 — szczelina powietrzna; tt — podziałka żłobkowa;
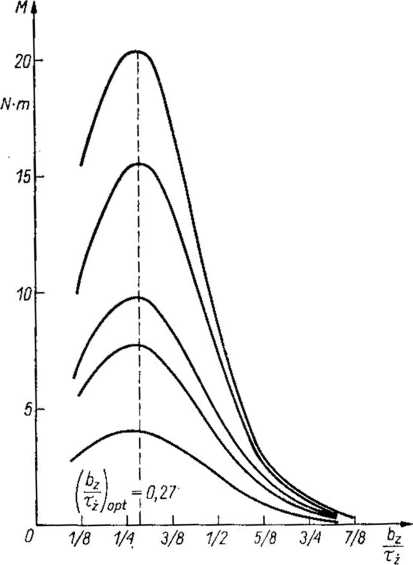
Rys. 5.8. Krzywe optymalnej wartości stosunku szerokości zęba stojana do podziałki żłobkowej wirnika w reluktancyjnym silniku skokowym M — f j przy rtl& = « const (wg [101])
A i ~ permeancja wirnika w położeniu 1;
A2 — permeancja wirnika w położeniu 2.
Posługując się powyższymi zależnościami można optymalizować parametry silnika. Krzywe optymalnej wartości stosunku szerokości zęba stojana do podziałki żłobkowej wirnika bs(xt — przy stałej wartości stosunku podziałki żłobkowej wirnika do szczeliny powietrznej (rż/<5 = const) z uwagi na możliwość otrzymania maksymalnego momentu obrotowego — otrzymane eksperymentalnie pokazano na rys. 5.8. Z krzywych można odczytać
Wyszukiwarka
Podobne podstrony:
instalacje134 5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 148 Rys. 5.5. Szkic konstrukcyjny silnika sko
instalacje136 5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 152 Rys. 5.9. Krzywe optymalnych wartości wym
instalacje138 5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 156 Rys. 5.11. Szkic wymiarowy pięciopasmoweg
instalacje132 5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 146 Niektóre obliczenia przeprowadzono przy z
instalacje137 1>
22165 instalacje137 1>
21963 instalacje131 5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 144 5. UWAGI O OBLICZANIU SILNIKÓW SKOK
22165 instalacje137 1>
instalacje137 1>
więcej podobnych podstron