21963 instalacje131

5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 144
5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 144
1


Rys. 5.2. Szkic perspektywiczny na-biegunników kłowych i magnesu trwałego (widok zewnętrzny wycinka (wg [ 109]))
l — magnes trwały; 2 — kły stojana
Rc oznacza rcluktancję magnetowodu. Rozważany jest silnik przy pracy synchronicznej z pojemnościowym przesunięciem fazowym.
Równanie ułożone na podstawie modelu z rys. 5.1 wraz z równaniami mechanicznymi umożliwiają zrealizowanie symulowania dynamicznego zachowania silnika. Otrzymany układ równań różniczkowych ma postać
~dT = 7 {r»i(0. #i) +r*2(0, <f>2)+r,}
(5.3)
d^ =-lN {u,-RUe,*,yr, 1 = 1.2
ÓUZ_ __ dUj_ _ I2 dr ~ dt~ C
gdzie:
0 — pozycja magnesu w stosunku do zębów; rm — moment magnetyczny wirnika;
rt — moment obciążenia.
Wzory te definiują: strumienie magnetyczne, napięcia cewek oraz prędkość i położenie wirnika.
Rozwiązanie przez elementy skończone daje powierzchnie rm(0,V)
1 <P (0, K), które mogą być przedstawione w postaci
(5.4)
rm(6,4>)
Z drugiej strony zależność, która łączy prąd cewki i przenikający ją strumień (zgodnie ze schematem na rys. 5.1) ma następującą postać:
/ = /(£,<*>) =
(5.5)
v(0,<p)+rc* + -JL.
R
N-ł— —
NR,
Zależności (5.4) i (5.5) pozwalają zdefiniować całkowicie układ kanoniczny (5.3).

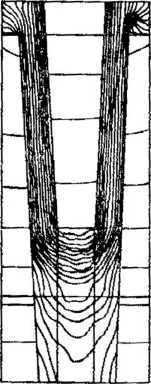
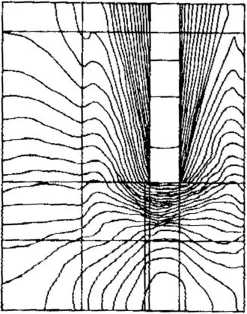
0-z
Rys. 5.3. Ekwipotencjalue Unie skalarne w różnych rzutach silnika 10 Silniki skokowe
Wyszukiwarka
Podobne podstrony:
instalacje134 5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 148 Rys. 5.5. Szkic konstrukcyjny silnika sko
instalacje136 5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 152 Rys. 5.9. Krzywe optymalnych wartości wym
instalacje138 5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 156 Rys. 5.11. Szkic wymiarowy pięciopasmoweg
instalacje132 5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 146 Niektóre obliczenia przeprowadzono przy z
instalacje137 1>
22165 instalacje137 1>
22165 instalacje137 1>
26158 instalacje135 5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 150 5. UWAGI O OBLICZANIU SILNIKÓW SKOK
instalacje137 1>
więcej podobnych podstron