33412 P1080361
13. Zastosowania robotów przemysłowych
wybór tych stanowisk, które w pierwszej kolejności powinny być zrobotyzowane co jest określane tradycyjnie pojęciem: podatność na robotyzacją. Określenie po-datności na robotyzację wg rodzaju procesu jako podstawowego kryterium oceny może być stosowane w warunkach, w których wdrażanie nowych środków techniki nie napotyka barier organizacyjnych i strukturalnych. W przypadku istnienia ograniczeń, typowania stanowisk produkcyjnych dokonuje się metodami ekspertowymi na podstawie oceny wielokiyterialnej. Za bardzo podatne uważa się stanowiska dające się zrobotyzować przy najmniejszych nakładach i takie, które obiecują dużą niezawodność. Za dobrze podatne uważa się te stanowiska, od których oczekuje się wysokiej niezawodności, ale które wymagają większych zmian w środkach produkcji i ewentualnie w konstrukcji czy technologii wyrobu. Za warunkowo przydatne uważa się te stanowiska, dla których łączny nakład inwestycyjny jest znaczny, a wymagane działanie można osiągnąć tylko za pomocą skomplikowanego cyklu automatycznego lub gdy występuje konieczność przestawienia produkcji. Wytypowanie stanowiska produkcyjnego wiąże się jednocześnie z określeniem spektrum przedmiotów do wykonywania w zrobotyzowanym systemie, co jest punktem wyjścia do rozpoczęcia prac projektowych.
W przypadku zrobotyzowanych systemów obróbkowych zadanie projektowe w swej istocie często sprowadza się do określenia optymalnej kompozycji podsystemów przepływu wyrobów [42]. Zadanie to można rozwiązać, biorąc pod uwagę ruchy wykonywane przez podsystemy stanowiska obróbkowego podczas transportowania i manipulowania przedmiotami.
W ogólnym przypadku będą to następujące ruchy:
- podanie przedmiotu lub palety z przedmiotami w strefę pracy robota, zadanie to wykonuje podsystem transportu,
- uchwycenie przedmiotu lub narzędzia, zdjęcie z elementów bazowych, wprowadzenie w taki punkt przestrzeni, gdzie pojawia się możliwość swobodnego manipulowania,
- transportowanie przedmiotu lub narzędzia w sferę roboczą stanowiska technologicznego,
- włożenie przedmiotu do stanowiska technologicznego lub wykonanie operacji technologicznej (spawanie, zgrzewanie itp.),
- ruchy wykonywane w odwrotnej kolejności, związane z manipulacją wykonanym przedmiotem.
Po przyporządkowaniu określonych ruchów poszczególnym podsystemom można stworzyć wiele wariantów modeli strukturalnych zrobotyzowanego systemu wytwarzania, co wiąże się z dużym zróżnicowaniem konstrukcji robotów i magazynów przystanowiskowych. Następnie po analizie tych kompozycji, z uwzględnieniem czasów trwania ruchów manipulacyjnych oraz czasów obróbki, można wybrać konfigurację optymalną względem określonego kryterium.
Jak wynika z prowadzonych rozwiązań, projektowanie zrobotyzowanych systemów wytwarzania obejmuje trzy wzajemnie powiązane grupy problemów:
- ustalenie zadania produkcyjnego.
ustalenie procesu technologicznego,
- dobór systemu wytwarzania.
13.1.2. Najważniejsze cechy projektowania mechatronicznego
Jak napisano już wcześniej, przykładem produktu mechatronicznego są roboty, stąd też budowane z nich stacje, gniazda i systemy obróbkowe są obiektami mechatronicznymi. Produkty mechatroniczne charakteryzują się następującymi cechami:
- elastycznością rozumianą jako łatwość modyfikacji konstrukcji w czasie projektowania, produkcji lub eksploatacji, np. modułowością,
- inteligencją, czyli możliwością samodzielnego wypracowywania decyzji, uczenia się lub komunikacji z otoczeniem,
- multifiinkcyjnością, czyli możliwością realizacji różnych funkcji przez to samo urządzenie w wyniku prostej transformacji, np. zmianę oprogramowania,
- sposobem realizacji procesu technologicznego w sposób w pełni zautomatyzowany, co wymaga od urządzenia specjalnego interfejsu użytkownika w celu komunikacji z operatorem,
- zależnością od rynku i możliwościami technologicznymi producenta.
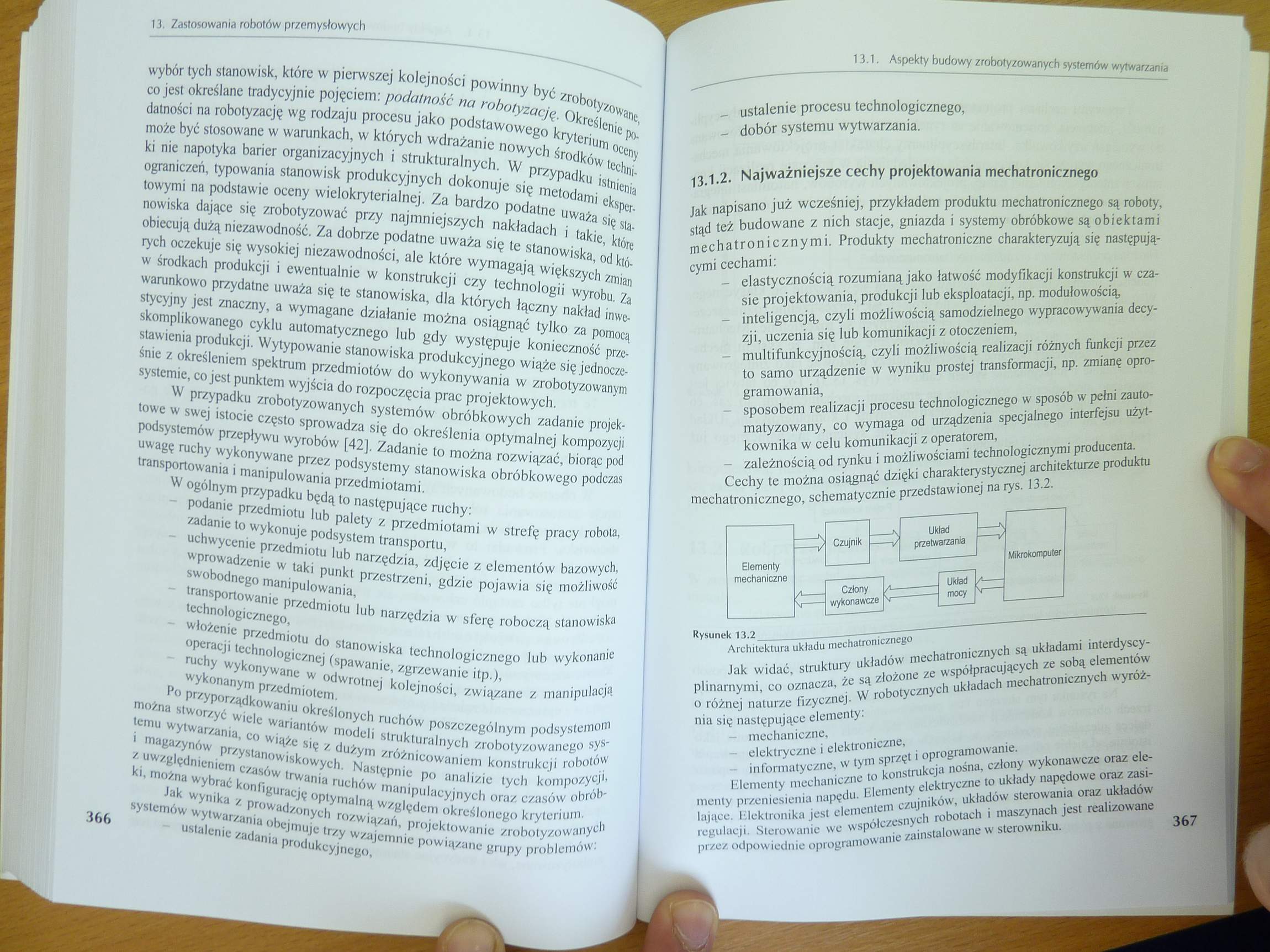
Cechy te można osiągnąć dzięki charakterystycznej architekturze produktu
mechatronicznego, schematycznie przedstawionej na rys. 13.2.
|
-✓ |
Czujnik |
—v> |
przetwarzania |
-✓ | ||||
|
Elementy |
Mikrokomputer | |||||||
|
mechaniczne | ||||||||
|
/-- |
Człony |
A- |
Układ |
/*- | ||||
|
s 1 1 | ||||||||
Rysunek 13.2___- - - L- H
Architektura układu mechatronicznego
Jak widać, struktury układów mechatronicznych są układami interdyscyplinarnymi, co oznacza, że są złożone ze współpracujących ze sobą elementów o różnej naturze fizycznej. W robotycznych układach mechatronicznych wyróżnia się następujące elementy:
- mechaniczne,
- elektryczne i elektroniczne,
- informatyczne, w tym sprzęt i oprogramowanie.
Elementy mechaniczne to konstrukcja nośna, człony wykonawcze oraz elementy przeniesienia napędu. Elementy elektryczne to układy napędowe oraz zasilające. Elektronika jest elementem czujników, układów sterowania oraz układów regulacji. Sterowanie we współczesnych robotach i maszynach jest realizowane przez odpowiednie oprogramowanie zainstalowane w sterowniku.
367
Wyszukiwarka
Podobne podstrony:
P1080375 13. Zastosowania robotów przemysłowym - mają duży udźwig, -
12883 P1080363 13. Zastosowania robotów przemysłowych - łuk utrzymuje się między d
17266 P1080390 13. Zastosowania robotów przemysłowych układy sensoryczne, jest fakt, że prace montaż
więcej podobnych podstron