40258 P1080389
13. Zastosowania robotów przemysłowych
nyni, dwoma lub kilkoma robotami pracującymi jednocześnie, mogło wykonać wszystkie wymagane zadania montażowe potrzebne do zmontowania wyrobu lub podzespołu. Każda stacja robocza zawiera pełne pomocnicze wyposażenie potrzebne do zrealizowania zadań montażowych. Zadania, do których jest stosowany równoległy system montażowy, wymagają od robota zazwyczaj możliwości szybkiej wymiany narzędzia lub wielonarzędziowej pracy.
Szeregowy system montażowy to rozwiązania przedstawione w tablicy 13.2 na pozycjach 8 i 9.
Podobnie jak w przypadku stanowisk spawalniczych, tak i stanowiska montażowe można konfigurować z modułowych urządzeń manipulacyjnych, które ułatwiają ich budowę oraz umożliwiają rozszerzenie możliwości kinematycznych robota, zwiększając liczbę stopni swobody. W ostatnich latach można zaobserwować rozwój w budowie urządzeń manipulacyjnych robotów współpracujących z robotami montażowymi. Liczne firmy oferują manipulatory, stoły obrotowe, zespoły przesuwu liniowego itd. Przykładowy zespół takich urządzeń przedstawiono na rys. 13.46.
13.5.3. Roboty do zadań montażowych
Roboty w systemach montażowych mogą wykonywać następujące prace:
- odbieranie części z pojemników lub przenośników,
- ustawianie części na montowany wyrób,
- wykonywanie operacji łączenia (wciskanie, nitowanie, zgrzewanie punktowe i liniowe itp.),
- odkładanie i transportowanie zmontowanych wyrobów.
Do cech konstrukcyjnych określających przeznaczenie robotów do montażu można zaliczyć [48,75]:
- możliwość automatycznej wymiany chwytaków i narzędzi montażowych,
- szeroki zakres prędkości przemieszczeń organów wykonawczych,
- możliwość adaptacji do określonych warunków chwytania i łączenia części,
- możliwość kontroli jakości montażu,
- dokładność pozycjonowania lub obecność mechanizmów umożliwiających kompensację błędów w trakcie łączenia części.
Ze względu na te wymagania roboty stosowane w systemach montażowych powinny mieć zwiększoną dokładność pozycjonowania oraz zwiększoną funkcjonalną elastyczność. Stąd też zaprojektowano roboty przeznaczone specjalnie do zadań montażowych, o kinematyce:
• PUMA (ang. programmable universal manipulator for assembly),
• SCARA (ang. selectively compliant assembly robot arm).
Roboty tego typu są produkowane przez liczne firmy, ich udźwig zawiera się w zakresie od 2 do lOdaN (przeważnie 4 + 5 daN). zasięg manipulacji nie przekracza zazwyczaj 620 mm, powtarzalność pozycjonowania wynosi od ±0,02
do ±0,05 mm, prędkość ruchu elementu wykonawczego mieści się w zakresie 0d 4,7 do 7,3 m/s, a masa między 35 a 110 kg. Pojawiły się też duże i ciężkie roboty o kinematyce SCARA (udźwig 15-5-50 daN, zasięg manipulacji 1200 mm), co świadczy o rosnącym zapotrzebowaniu automatyzacji montażu dużych i ciężkich zespołów.
Na rysunku 13.47 przedstawiono robota montażowego firmy Staubli Uni-mation o kinematyce PUMA, a na rys. 13.48 robota montażowego o kinematyce SCARA.
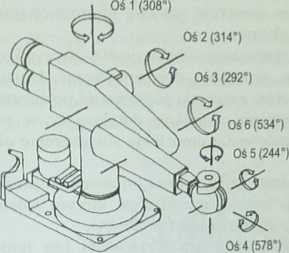
Rysunek 13.47 ____________—----3
Robot montażowy PUMA 260 A finny Staubli Unimation z zaznaczonym sami ruchów w poszczególnych osiach [283]
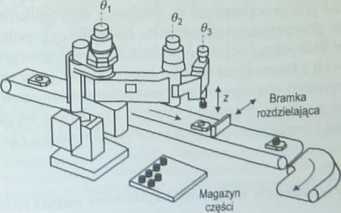
Rvsum Koho4.8SCARA^półpracujący z przenośnikiem [237]
W przypadku zastosowania robotów w pracach montażowych niezbędne jest wyposażenie stanowisk montażu w układy sensoryczne, mające tu o wiele flesze znaczenie oraz częściej stosowane niż w jakichkolwiek innych syste-I)»i'ch Ryzowanych. Jedną z przyczyn, z powodu których są stosowane

421
Wyszukiwarka
Podobne podstrony:
12883 P1080363 13. Zastosowania robotów przemysłowych - łuk utrzymuje się między d
P1080375 13. Zastosowania robotów przemysłowym - mają duży udźwig, -
17266 P1080390 13. Zastosowania robotów przemysłowych układy sensoryczne, jest fakt, że prace montaż
więcej podobnych podstron