57224 Untitled Scanned 29 (8)
grupowymi. Zawsze możemy znaleźć takie dwie wartości Xt i X2, aby wyrazić każdą wartość reakcji odrzuconych więzów. Liczba niewiadomych przy tym sposobie ich wyrażania nie ulega zmianie.
W przykładzie pokazanym na rys. 13.31 dzięki symetrii wykresu A/j i antysymetrii M2 otrzymamy S12=S21—0.
|
f) -Trrfflllffl |
r&r. | |
|
jttmt §§§ | ||
|
= | ||
|
* | ||
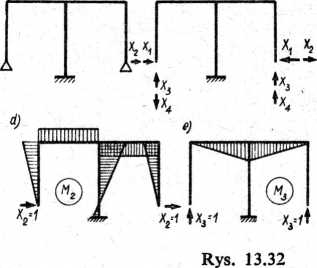
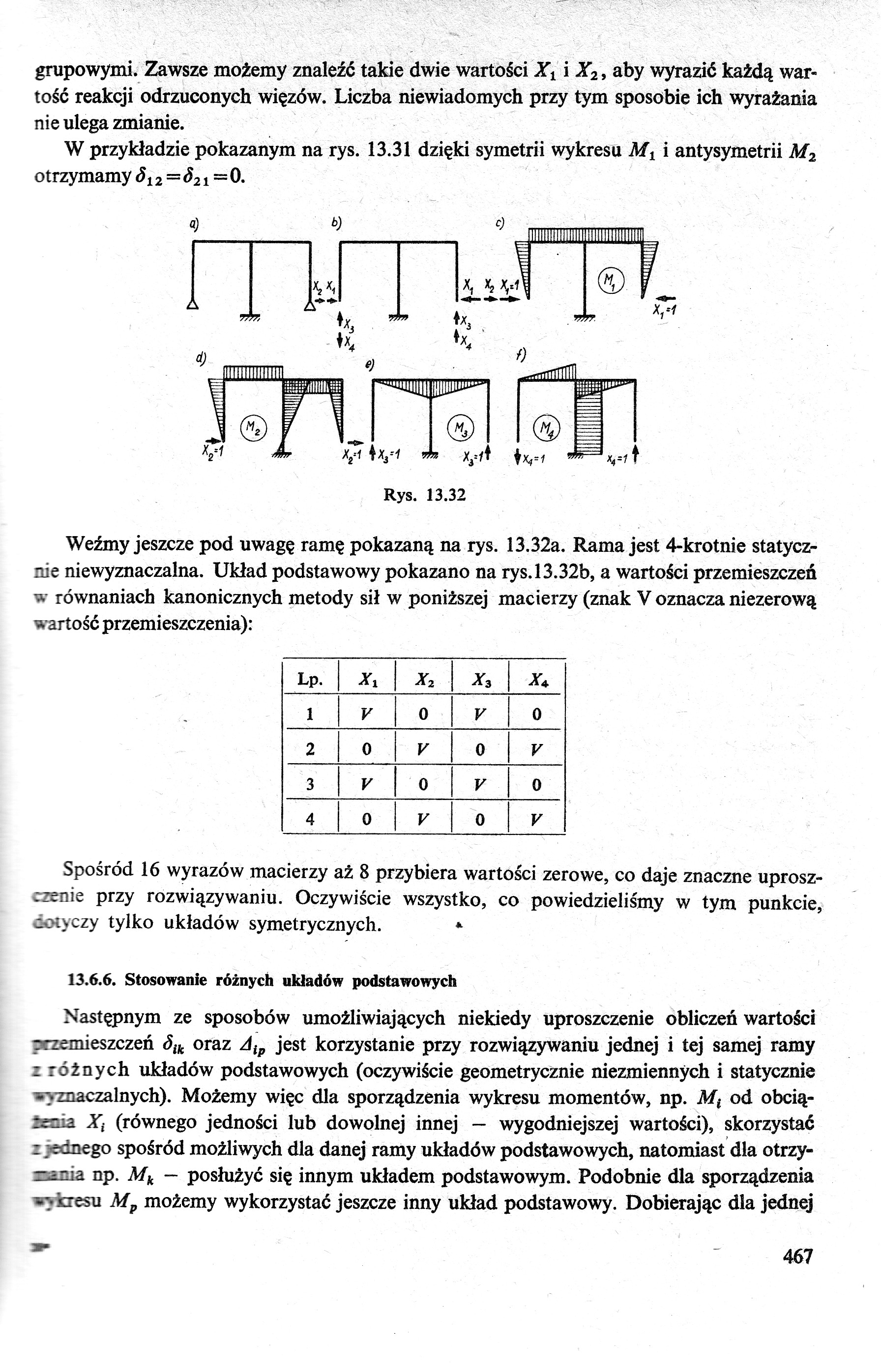
Weźmy jeszcze pod uwagę ramę pokazaną na rys. 13.32a. Rama jest 4-krotnie statycznie niewyznaczalna. Układ podstawowy pokazano na rys.13.32b, a wartości przemieszczeń w równaniach kanonicznych metody sił w poniższej macierzy (znak V oznacza niezerową wartość przemieszczenia):
|
Lp. |
Xl |
x2 |
X3 |
X* |
|
1 |
V |
0 |
V |
0 |
|
2 |
0 |
V |
0 |
V |
|
3 |
V |
0 |
V |
0 |
|
4 |
0 |
V |
0 |
V |
Spośród 16 wyrazów macierzy aż 8 przybiera wartości zerowe, co daje znaczne uproszczenie przy rozwiązywaniu. Oczywiście wszystko, co powiedzieliśmy w tym punkcie, dotyczy tylko układów symetrycznych. *
13.6.6. Stosowanie różnych układów podstawowych
Następnym ze sposobów umożliwiających niekiedy uproszczenie obliczeń wartości przemieszczeń Sik oraz Aip jest korzystanie przy rozwiązywaniu jednej i tej samej ramy z różnych układów podstawowych (oczywiście geometrycznie niezmiennych i statycznie -yznaczalnych). Możemy więc dla sporządzenia wykresu momentów, np. M-t od obciążenia Xt (równego jedności lub dowolnej innej - wygodniejszej wartości), skorzystać i jednego spośród możliwych dla danej ramy układów podstawowych, natomiast dla otrzy-rcania np. Mk - posłużyć się innym układem podstawowym. Podobnie dla sporządzenia kresu Mp możemy wykorzystać jeszcze inny układ podstawowy. Dobierając dla jednej
467
Wyszukiwarka
Podobne podstrony:
Untitled Scanned 29 2 <f Małcrtal era liebł... <*b »/lrt Ły UflM Uk-U«t •
Untitled Scanned 29 65 (5) (p*-*q) a (r «-» s) -> lip «-» r) 4- (ng v .*) a (n.v v <?)] 33 ::
Untitled Scanned 29 u "-1 ^ ~ Ti TT) - k°> dom 051 cbc^tmcj^ = 0,0£6m >/ 0,05i-- 0,05-0
41527 Untitled Scanned 29 (9) Wskazówki dla nauczycieliA 4 w. 187 Nauczyciel omawia z dziećmi ilustr
44239 Untitled Scanned 31 Wszedłszy na schody, znaleźliśmy się na czymś w rodzaju szczerbatego taras
69124 Untitled Scanned 29 sin podstępne stare wypełza zza rogu w postaci jakiejś uliczki chodzącej o
Untitled Scanned 29 Imię i nazwisko PIENIĄDZ I BANKOWOŚĆ I. TEST Zaznacz, czy poniższe zdanie jest p
Untitled Scanned 29 (2) k rl(0 kirtci) = 1,05, k^iui kśrt(z)1,01, 2.4.3. Pytania 1. &nbs
Untitled Scanned 29 (9) Wskazówki dla nauczycieliA 4 w. 187 Nauczyciel omawia z dziećmi ilustrację,
więcej podobnych podstron