62640 P1080339
10. Sztuczna inteligencja w robotyce
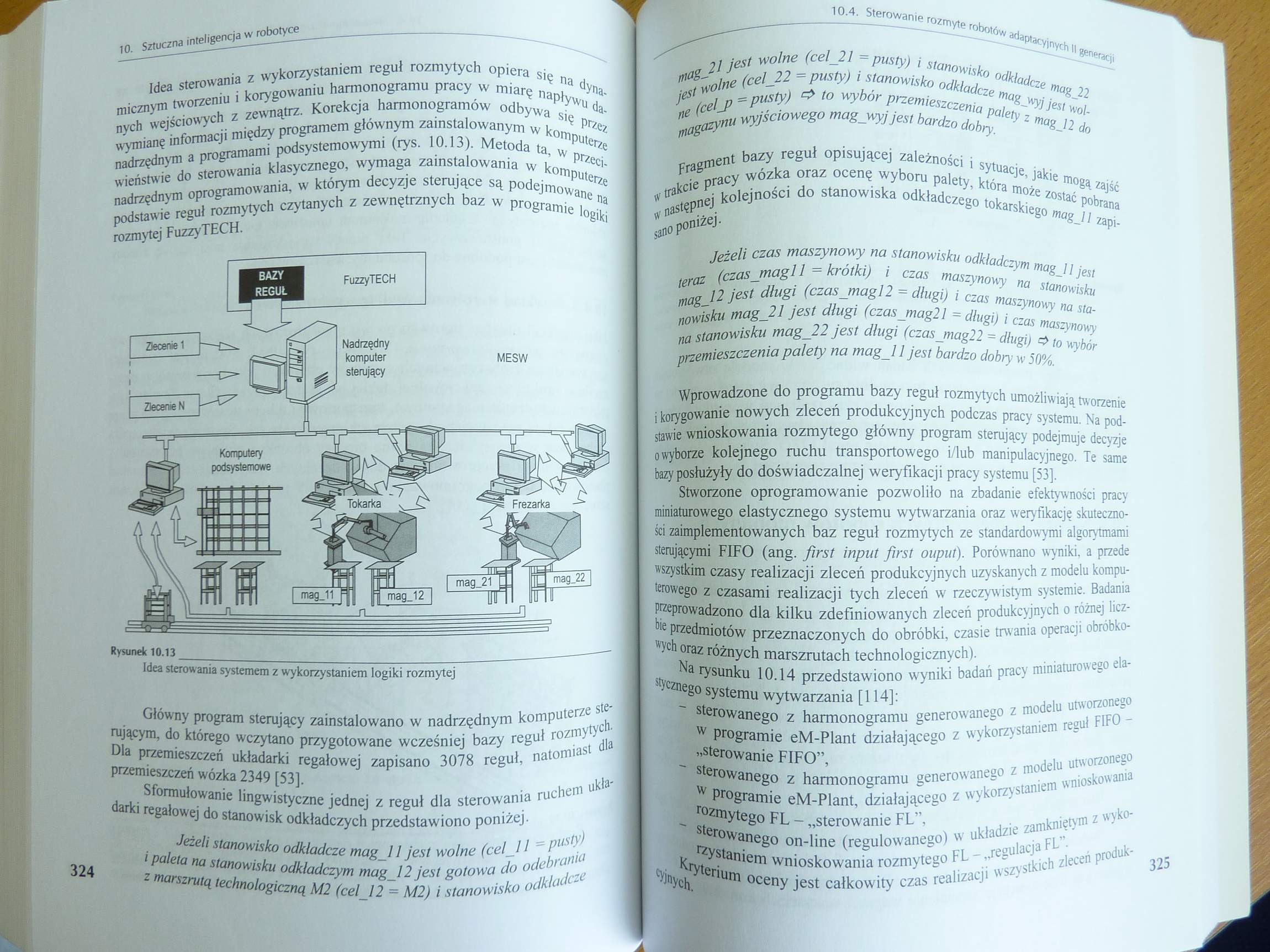
Idea sterowania z wykorzystaniem reguł rozmytych opiera się na dynamicznym tworzeniu i korygowaniu harmonogramu pracy w miarę napływu danych wejściowych z zewnątrz. Korekcja harmonogramów odbywa się przez wymianę informacji między programem głównym zainstalowanym w komputerze nadrzędnym a programami podsystemowymi (rys. 10.13). Metoda ta, w przeciwieństwie do sterowania klasycznego, wymaga zainstalowania w komputerze nadrzędnym oprogramowania, w którym decyzje sterujące są podejmowane na podstawie reguł rozmytych czytanych z zewnętrznych baz w programie logiki rozmytej FuzzyTECH.
10. Sztuczna inteligencja w robotyce
MESW
FuzzyTECH
Zlecenie
Nadrzędny
komputer
sterujący
Zlecenie N
IK
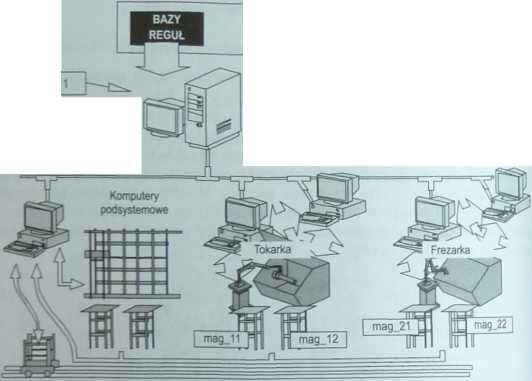
Rysunek 10.13 Mb »; _
Idea sterowania systemem z wykorzystaniem logiki rozmytej
Główny program sterujący zainstalowano w nadrzędnym komputerze sterującym, do którego wczytano przygotowane wcześniej bazy reguł rozmytych-Dla przemieszczeń układarki regałowej zapisano 3078 reguł, natomiast dla przemieszczeń wózka 2349 [53].
Sformułowanie lingwistyczne jednej z reguł dla sterowania ruchem układarki regałowej do stanowisk odkładczych przedstawiono poniżej.
Jeżeli stanowisko odkładcze mag_J 1 jest wolne (ce/_l 1 = pusty) i paleta na stanowisku odkładczym mag_12 jest gotowa do odebrania 324 z marszrutą technologiczną M2 (cel_12 = M2) i stanowisko odkładcze
mag_21 jest wolne (cel_21 = pusty) i stanowisko odkładcze mag_22 jest wolne (cel_22 — pusty) i stanowisko odkładcze magwyj jest wolne (cel_p = pusty) & to wybór przemieszczenia palety z mag_12 do magazynu wyjściowego magjwyj jest bardzo dobry.
Fragment bazy reguł opisującej zależności i sytuacje, jakie mogą zajść w trakcie pracy wózka oraz ocenę wyboru palety, która może zostać pobrana w następnej kolejności do stanowiska odkładczego tokarskiego mag li zapisano poniżej.
Jeżeli czas maszynowy na stanowisku odkładczym mag li jest teraz (czasjnagll — krótki) i czas maszynowy na stanowisku mag_12 jest długi (czas_magl2 = długi) i czas maszynowy na stanowisku mag_21 jest długi (czas_mag21 = długi) i czas maszynowy na stanowisku mag_22 jest długi (czas_mag22 = długi) <=> to wybór przemieszczenia palety na mag_ll jest bardzo dobry w 50%.
Wprowadzone do programu bazy reguł rozmytych umożliwiają tworzenie i korygowanie nowych zleceń produkcyjnych podczas pracy systemu. Na podstawie wnioskowania rozmytego główny program sterujący podejmuje decyzje o wyborze kolejnego ruchu transportowego i/lub manipulacyjnego. Te same bazy posłużyły do doświadczalnej weryfikacji pracy systemu [53].
Stworzone oprogramowanie pozwoliło na zbadanie efektywności pracy miniaturowego elastycznego systemu wytwarzania oraz weryfikację skuteczności zaimplementowanych baz reguł rozmytych ze standardowymi algorytmami sterującymi FIFO (ang. first input jirst ouput). Porównano wyniki, a przede wszystkim czasy realizacji zleceń produkcyjnych uzyskanych z modelu komputerowego z czasami realizacji tych zleceń w rzeczywistym systemie. Badania przeprowadzono dla kilku zdefiniowanych zleceń produkcyjnych o różnej liczbie przedmiotów przeznaczonych do obróbki, czasie trwania operacji obróbkowych oraz różnych marszrutach technologicznych).
Na rysunku 10.14 przedstawiono wyniki badań pracy miniaturowego elastycznego systemu wytwarzania [114]:
- sterowanego z harmonogramu generowanego z modelu utworzonego w programie eM-Plant działającego z wykorzystaniem reguł FIFO -„sterowanie FIFO”,
- sterowanego z harmonogramu generowanego z modelu utworzonego w programie eM-Plant, działającego z wykorzystaniem wnioskowania rozmytego FL ^ „sterowanie FL”,
~ sterowanego on-line (regulowanego) w układzie zamkniętym z wykorzystaniem wnioskowania rozmytego FL - „regulacja FL”.
Kryterium oceny jest całkowity czas realizacji wszystkich zleceń produk-ly%ch.
325
Wyszukiwarka
Podobne podstrony:
P1080333 10. Sztuczna inteligencja w robotyce Podstawowe zadanie systemu planowania i wykonania dzia
P1080337 10. Sztuczna inteligencja w robotyce 10.4. Sterowanie rozmyte robotów adaptacyjnych II gene
P1080334 10. Sztuczna inteligencja w robotyce Zmodyfikowana waga 00.2) W procesie samouczenia, opisa
74879 P1080341 10. Sztuczna inteligencja w robotyce 10. Sztuczna inteligencja w robotyce Nowe wagi k
więcej podobnych podstron