74714 img252 (5)
246 Sieci rekurencyjr
=> Równowaga w tej prostej sieci może być osiągnięta (bez trwającego w trakcie całej symulacji sygnału wejściowego) jedynie w taki sposób, że na stałe iloczyn pewnego sygnału wyjściowego po przemnożeniu przez wagę odpowiedniego wejścia, daje sygnał wyjściowy równy dokładnie sygnałowi sprzężenia zwrotnego potrzebnemu do tego, by wytworzyć dany sygnał wyjściowy.
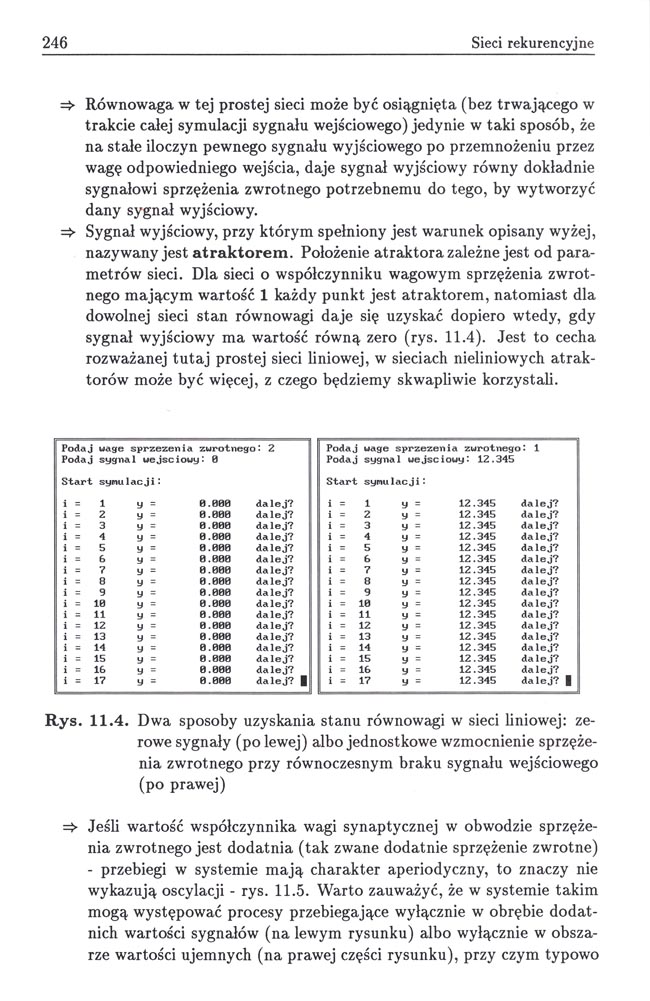
=> Sygnał wyjściowy, przy którym spełniony jest warunek opisany wyżej, nazywany jest atraktorem. Położenie atraktora zależne jest od parametrów sieci. Dla sieci o współczynniku wagowym sprzężenia zwrotnego mającym wartość 1 każdy punkt jest atraktorem, natomiast dla dowolnej sieci stan równowagi daje się uzyskać dopiero wtedy, gdy sygnał wyjściowy ma wartość równą zero (rys. 11.4). Jest to cecha rozważanej tutaj prostej sieci liniowej, w sieciach nieliniowych atrak-torów może być więcej, z czego będziemy skwapliwie korzystali.
Rys. 11.4. Dwa sposoby uzyskania stanu równowagi w sieci liniowej: zerowe sygnały (po lewej) albo jednostkowe wzmocnienie sprzężenia zwrotnego przy równoczesnym braku sygnału wejściowego (po prawej)
=> Jeśli wartość współczynnika wagi synaptycznej w obwodzie sprzężenia zwrotnego jest dodatnia (tak zwane dodatnie sprzężenie zwrotne) - przebiegi w systemie mają charakter aperiodyczny, to znaczy nie wykazują oscylacji - rys. 11.5. Warto zauważyć, że w systemie takim mogą występować procesy przebiegające wyłącznie w obrębie dodatnich wartości sygnałów (na lewym rysunku) albo wyłącznie w obszarze wartości ujemnych (na prawej części rysunku), przy czym typowo
Wyszukiwarka
Podobne podstrony:
44448 Image0009 (14) Wszystko, co rzeczywiste, jest organiczne w tej mierze, w jakiej może być pomyś
skanowanie0003 4 Regulacja sieci Wyrównanie strat ciśnienia w sieci może być zrealizowane następując
układu współrzędnych, to odległość od początku układu do dowolnego węzła sieci może być
Rys. 2.1. Schemat podłączenia testera do gniazda diagnostycznego Dzięki tej diagnostyce usterka może
477 (6) i^nyJU«chni po » w tej długości 21 może ślizgać się bez tarcia gg- walca o promieniu R. Prę
Image0009 (14) Wszystko, co rzeczywiste, jest organiczne w tej mierze, w jakiej może być pomyślane t
DSCN1788 136 Petryfikacja zbiorowej. Z tej perspektywy permisywizm może być traktowany jako oznaka
DSC00550 d) 90-krotny wzrost szybkości reakcji 6. Grupa prostetyczaaa enzymów może
życie tej młodej kobiety może byc stosunek do rodziców. Nadmierne przywiązanie lub osądzanie i niena
86,87 (4) jak skutecznie negocjować znane praktykom tej dziedziny, nic może być jednak zalecane jak
161 Napięcie tej dodawczej prądnicy może być regulowane w granicach od — Vn do-f V2 zapomocą prądu w
86,87 (4) Jak skutecznie negocjować znane praktykom tej dziedziny, nie może być jednak zalecane ja t
Image0009 (14) Wszystko, co rzeczywiste, jest organiczne w tej mierze, w jakiej może być pomyślane t
20 Public relations od podstaw Oznaką tego, jak bardzo znaczący jest rozwój tej dziedziny w Polsce,
44448 Image0009 (14) Wszystko, co rzeczywiste, jest organiczne w tej mierze, w jakiej może być pomyś
więcej podobnych podstron