85167 skrypt0
Ijniowa CvrnowA rn trac.ia opsżumia.iąca sygnałów
-
5.1.1. Podejście geometryczne
Rozważmy (n + I)-wymiarową podprzestrzeń Sjj rozpiętą na obserwacjach (zmiennych losowych) sygnału y
Sq —spon{y(t),y(l- I).....y('-n)} (5 14)
i załóżmy, że SJj jest podprzestrzenią ośrodkowej przestrzeni Hilberta. rozpiętej przez len sygnał, w której przeliczalny zbiór zmiennych losowych {>•(r t'))"0, jest zbiorem wszędzie gęstym (zbiór ten rozpina całą przestrzeń i Wówczas ten zbiór można traktować jako bazę wspomnianej przestrzeni Przyjmijmy również, że (nieobserwowany) sygnał losowy <|r) jest statystycznie związany (sko relowany) z obserwowanym sygnałem y (co - w sposób oczywisty wynika np z rys. 5.4). Załóżmy ponadto, że r(r) jest liniowo niezależny od zmiennych losowych {y(/),y(r- I),.. .,y(r - n)}. Gdyby tak nie było, to x(i) - jako element podprzestrzeni SĄ - byłby wyrażony jako kombinacja liniowa tych zmiennych losowych i w konsekwencji otrzymalibyśmy dokładne, tj.. odpowiadające zerowemu błędowi średniokwadratowemu. rozwiązanie problemu liltracii odszu miającej Odrzucając ten trywialny przypadek, odpowiadający sytuacji, kiedy
120
cccciiiie
Liniowa cyfrowa filtracja odszumiająca sygnałów
(^,>(<-*))tt = E<(0y(f-*)=o , k = 0.
5.1.2. Podejście algebraiczne
£
(5.21)
(5.22)
(5.23)
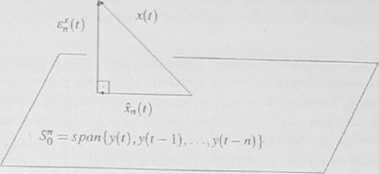
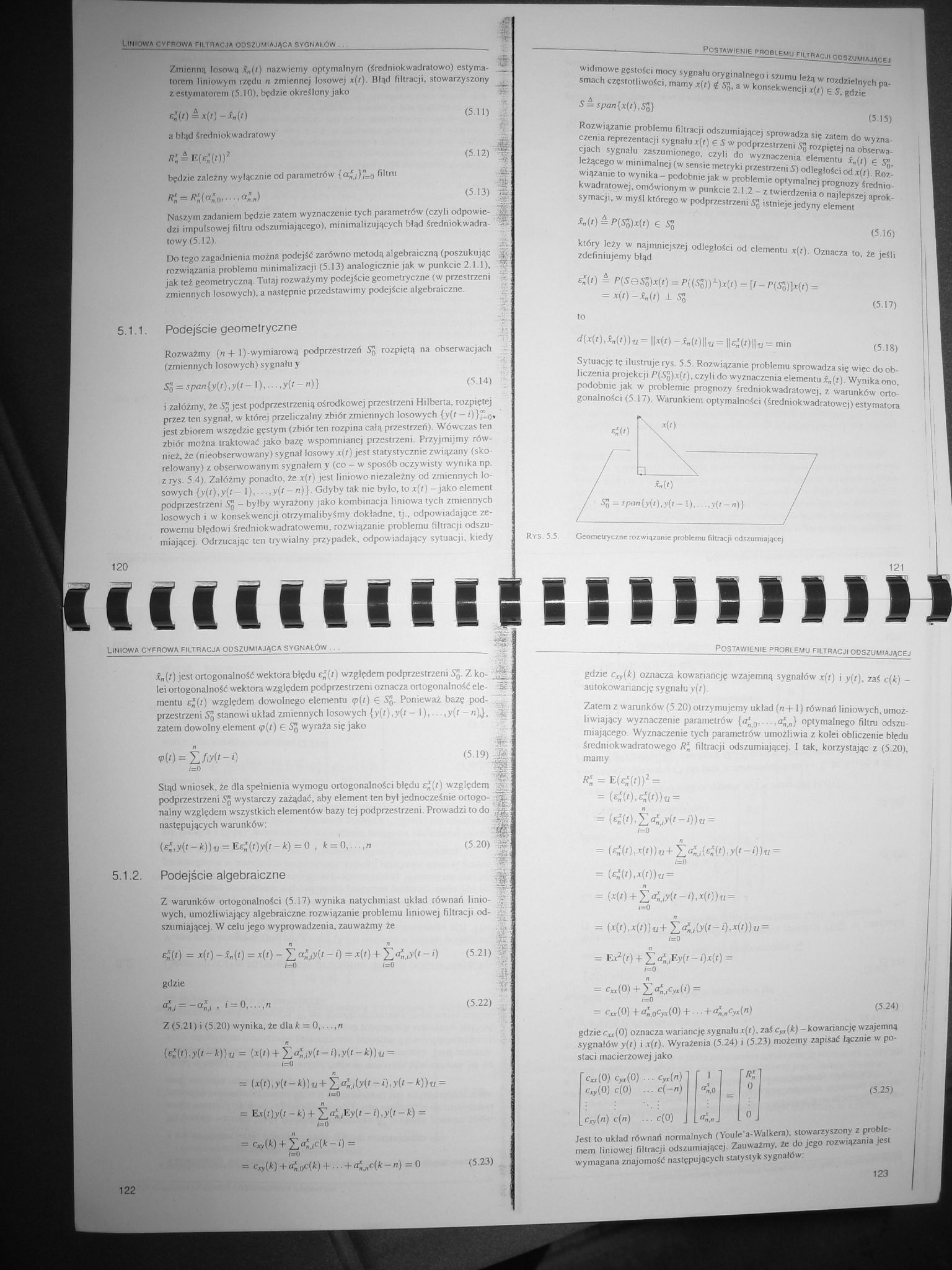
Rys. 5.5. Geometryczne rozwiązanie problemu filtracji odszumiającej
(5.24)
|
O ■5 O J? |
■ CyAn) |
' 1 | |||
|
Cxy(0) C(0) . |
■ c(-n) |
<0 |
= |
0 | |
|
Cry(/l) c(n) . |
■c( 0) . |
0 |
Zmienną losową .{„(t) nazwiemy optymalnym (śrcdniokwndratowo) estymatorem liniowym rzędu n zmiennej losowej x(i). Błąd filtracji, stowarzyszony z estymatorem (5.10), będzie określony jako
<(»)=*(/)-4,(0 (5.11)
a błąd śrcdniokwailratowy
K = ^ «(/))’ (5.12)
będzie zależny wyłącznie od parametrów {a’j}"_0 filtm
= o.....<n) (5 13) r;:|
Naszym zadaniem będzie zatem wyznaczenie tych parametrów (czyli odpowiedzi impulsowej filtru odszumiającego), minimalizujących hląd średniokwadra-towy (5.12).
Do tego zagadnienia można podejść zarówno metcxJą algebraiczną (poszukując rozwiązania problemu minimalizacji (5.13) analogicznie jak w punkcie 2.1.1), jak leż geometryczną Tutaj rozważymy podejście geometryczne (w przestrzeni zmiennych losowych), a następnie przedstawimy podejście algebraiczne.
x„[t) jest ortogonalność wektora błędu e*(() względem podprzestrzeni 5J]. Z ko-lei ortogonalność wektora względem podprzestrzeni oznacza ortogonalność cle- K mentu r^(t) względem dowolnego elementu <p(i) € Sjj. Ponieważ bazę pod-przestrzeni SĄ stanowi układ zmiennych losowych {y(f),y(f I). .,>•(/ n)J, j
zatem dowolny element <p(r) € 5^ wyraża się jako
<5-19) &
Stąd wniosek, że dla spełnienia wymogu ortogonalności błędu £jJ(t) względem podprzestrzeni 5[j wystarczy zażądać, aby element ten był jednocześnie ortogo- ■ nałny względem wszystkich elementów bazy tej podprzestrzeni Proscadzi to do następujących warunków: (5 20)
Z warunków ortogonalności (5.17) wynika natychmiast układ równań liniowych, umożliwiający algebraiczne rozwiązanie problemu liniowej filtracji od-szutniającej. W celu jego wyprowadzenia, zauważmy że
«£(0 = X(<) —^n(ł) = -t(r) - X </>'(' - 0 = X(‘) + X <■>’(' - 0
/=0 /=0
gdzie
<t=-<i i i = 0,...,n
Z (5.21) i (5.20) wynika, że dla k — 0,____n
-*))« = MO + X<M' - OM' -*))« =
i=0
= M').y(' -*))u+ X<,(y(' -<).)’(' - k))v =
i=0
= E-t(t)y(r -k) + XX,Ky(f - OM' ~ k) =
1=0
= cxy(*) + - i) -
/=0
= c,y(k) +ax„0c(k) + ... + <„r(k - n) =0
Postawienie problemu riLTnAcji OOBZUMIAJACEJ
widmowe gęstości mocy sygnału oryginalnego i szumu leżą w rozdzielnych pasmach częstotliwości, mamy jc(r) <ł SĄ, a w konsekwencji x(t) c 5, gdzie
S = si>an{x{l),S"„) (5.15)
Rozwiązanie problemu filtracji odszumiającej sprowadza się zatem do wyznaczenia reprezentacji sygnału r(l] 6 S w podprzestrzeni SJ rozpiętej na obserwacjach sygnału zaszumionego, czyli do wyznaczenia elementu f„(t) e SĄ. leżącego w minimalnej (w sensie metryki przestrzeni S) odległości od z(r). Rozwiązanie to wynika - podobnie jak w problemie optymalnej prognozy średnio-kwadralowej, omówionym w punkcie 2.1.2 - z twierdzenia o najlepszej aproksymacji, w myśl którego w podprzestrzeni SĄ istnieje jedyny element
je„(r)4p(sswo e są (5,i<3)
który leży w najmniejszej odległości od elementu x(r). Oznacza to, że jeśli zdefiniujemy błąd
£„'(') = P(SeSĄ)x(t) = P{(Sl))L)x(t) = [l-P(SĄ)]x{t) =
= x(r)-f„(r)l SĄ (5.17)
to
d(x(t),x„(t))u = |1*(») -4«(0llti= ll«J(0llti= mi" (5 |8)
Sytuację tę ilustmje rys 5.5. Rozwiązanie problemu sprowadza się więc do obliczenia projekcji P(S3)s(r), czyli do wyznaczenia elementu x„(r) Wynika ono. podobnie jak w problemie prognozy średniokwadralowej. z warunków ortogonalności (5.17). Warunkiem ODtymalności rśr«łn;»u..gg| jj
121
msiin
________Postawienie problemu filtracji odszumiającej
gdzie Cxy(i) oznacza kowariancję wzajemną sygnałów x(t) i y(r), zaś c(k) -autokowariancję sygnału y(r)
Zatem z warunków (5 20) otrzymujemy układ (n-l-1) równań liniowych, umożliwiający wyznaczenie parametrów {rr'0,.. ,crj.n} optymalnego filtru odszumiającego Wyznaczenie tych parametrów umożliwia z kolei obliczenie błędu średniokwadratowego R’„ filtracji odszumiającej. I tak, korzystając z (5.20), mamy
K = e«(0)2 =
= (<(/),<('))«=
= «(o.X<M' -«))«=
i-0
= -»))«=
i=0
= «(') .-*('))« =
= W ')+X<r".M'-o .*('))«=
1=0
= M')M'))u+Ż<»M'-0M'))u =
/=0
= Ex2(r) + X <,Ey(f - i'W0 =
= cx.(0) + X<,Cvx(i) =
i=0
= c«(0) + a'n0cyx (0) + <„c»x(n)
gdzie c„(0) oznacza wariancję sygnału x(i). zaś cy,{k) - kowariancję wzajemną sygnałów y(t) i x(r). Wyrażenia (5.24) i (5.23) możemy zapisać łącznie w postaci macierzowej jako
(5.25)
Jest to układ równań normalnych (Youle a-Walkera). stowarzyszony z problemem liniowej filtracji odszumiającej. Zauważmy, że do jego rozwiązania jest wymagana znajomość następujących statystyk sygnałów:
123
122
Wyszukiwarka
Podobne podstrony:
skrypt9 Cyfrowa rn trać ia adaptacyjna szeregów czasowych_6 4 Modelowanie stochastyczne szeregów cza
34799 skrypt1 LINIOWA CYFROWA FII.Tn^CJA OOSZUMIA.IĄCA SYGNAŁÓW . • kowariancji wz
skrypt5 6.3.1 en.T rir,T rn.T Rys 6.3. Sekcja &{pn+ j) filtru Cyfrowa rn.rracja anaptacyjna sze
230 PR3EGLĄD ELE!rn ‘atori a e *ia in :ka a. . 3 -•rt i) i - 2r. r.:- , ■ a
skrypt013 f Rozdział 1Wstęp W otaczającym nas środowisku powstaje wiele sygnałów, które do nas docie
skrypt118 120 I. = L =_U K u (6.16) Rx + Rn Mierzoną rezystancję Rx oblicza się z zależnościR, = R.
więcej podobnych podstron