19627 P1080242
5. Starowanie robotów przemysłowych
Sterowanie przyciskowe jest zbliżone do programowania dyskretnego robotów, gdzie wykorzystuje się sterownik ręczny z przyciskami do uruchamiania silników wykonawczych, w celu mechanicznego prowadzenia efektora przez szereg punktów w przestrzeni. W sterowaniu przyciskowym teleoperatorów ruchy organu roboczego są śledzone przez człowieka, a korekcji tego ruchu dokonuje sie stosownie do istniejącej sytuacji. Wadą jest konieczność skupienia uwagi na operowaniu właściwymi przyciskami, co sprzyja znużeniu operatora.
Dużo łatwiejsze w obsłudze jest sterowanie kopiujące zadaw aną pozycję. Urządzeniem sterującym (zwanym także fantomem) jest kinematycznie podobny układ ramion, jaki ma teleoperator (kopia organu roboczego w pewnej podziałce) łub w nowszych rozwiązaniach — joystick. Operator, obserwując położenie i zachowanie się części wykonaw czej, „kształtuje" ramiona urządzenia sterującego bądź odpowiednio manipuluje joystickiem (sterowanie joystickiem jest jednakże dis operatora trudniejsze i nie zapewnia dużej dokładności). Ruchy te są następnie kopiowane przez układ wykonaw czy teleoperatora. Liczba odpowiednich ruchów elementów urządzenia sterującego jest równa liczbie ruchów elementów organu roboczego manipulatora, a prędkość każdego z ruchów elementów urządzenia sterującego jest wartością prędkości jednego napędu roboczego organu wykonawczego ręki. Bez dodatkowych urządzeń można tu stosować mnemoniczność sterowania manipulatorem, przy' czym wektor prędkości efektora jest proporcjonalny do wektora odchylenia od położenia zerowego urządzenia sterowanego ręcznie. Prędkość ruchu przemieszczany ch części, ścisk związanych z ruchem ręki. jest więc proporcjonalna do ruchu elementów urzą- , dzeaia sterującego. W ten sposób jest możliwe bardzo precyzyjne sterowanie makroruchów obiektu za pomocą mikroptzemieszczeń elementów urządzenia | sterującego. Fizyczne obciążenie operatora jest bardzo małe.
Sterowanie kopiujące zadawaną pozycję z siłowym sprzężeniem zw rolnym jest znacznym udoskonaleniem. Informacja zwrotna o s-fttch i mnmemarh w układzie wykonawczym, powstających jako reakcje od wykonywanej pracy, jest przekształcana na wyczuwane przez operatora siły be dotonch sterownika. Ważną zaletą takiego sposobu sterowania jest ieagow r«f ca gwahowny wzrost obciążenia, si-deszenie. błąd podczas sterowania - co zabsz-precza jednostkę kwemityczną teleoperatora przed złamaniem lub zgięciem.
Układy sterowana, w których do sterowania będą użyte prądy' bioelek* | tryczne człowieka wykonującego ruchy, są w stadium opracowań teoretyk uych i kabontoryjuych.
5.4. Programowalne sterowniki logiczne PLC
Pimgi—uiaht sterowniki L-jgkzzse PLC (ag peogrammtabie logie ouwrr"- ■ glH* ** ifcBipikiiifimwiiyeh urządzeń wy
cmk których son jest opisany poez hokeje logiczne zmiennych proces* ' ’
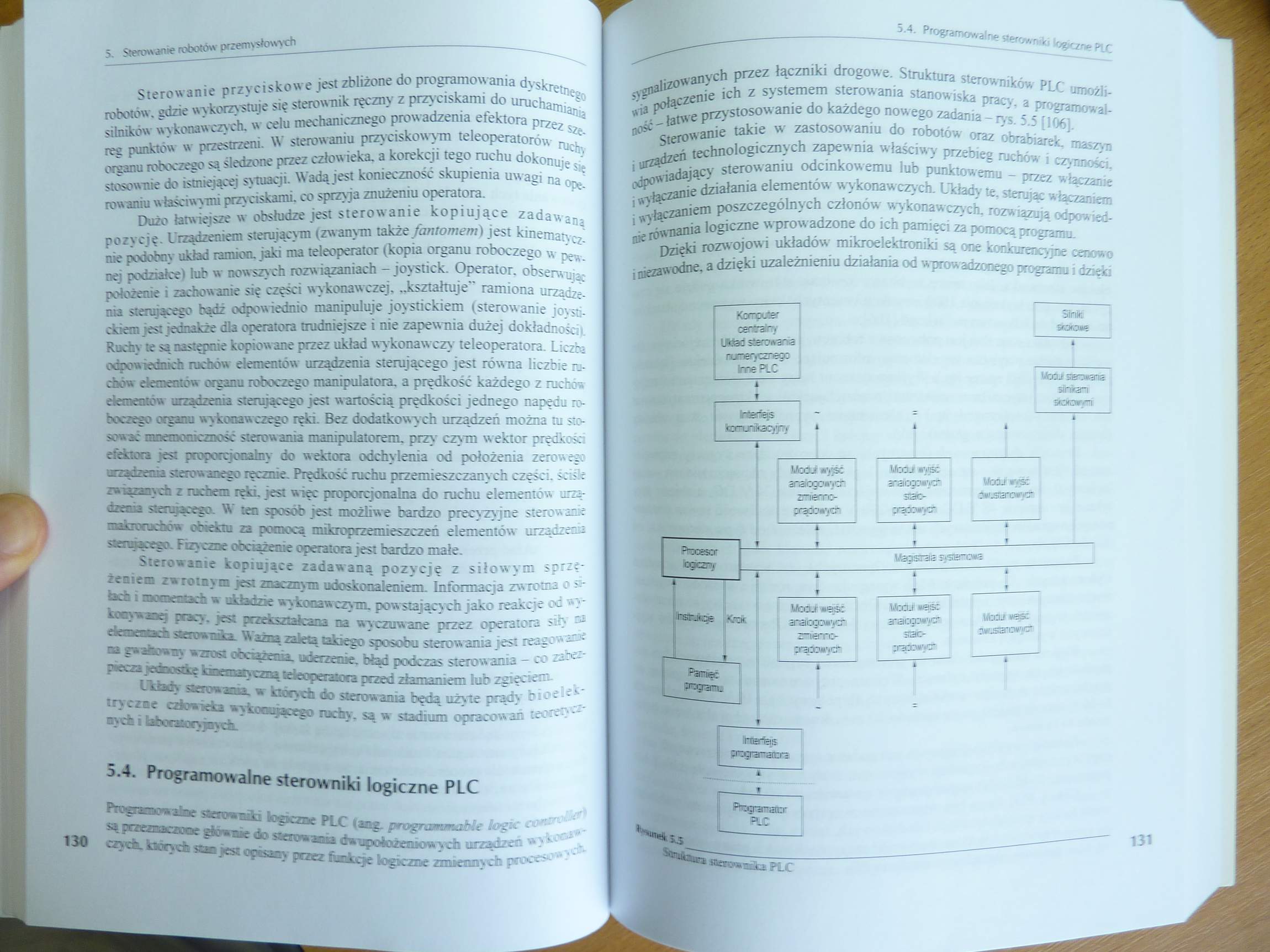
sygnalizowanych przez łączniki drogowe. Struktura sterowników PLC umożliwia połączenie ich z systemem sterowania stanowiska pracy, a programował-dość - łatwe przystosowanie do każdego nowego zadania - rys. 5.5 (106].
Sterowanie takie w zastosowaniu do robotów oraz obrabiarek, maszyn i urządzeń technologicznych zapewnia właściwy przebieg ruchów i czynności, odpowiadający sterowaniu odcinkowemu łub punktowemu - przez włączanie i wyłączanie działania elementów wykonawczych. Układy te, sterując włączaniem i wyłączaniem poszczególnych członów wykonawczych, rozwiązują odpowiednie równania logiczne wprowadzone do ich pamięci za pomocą programu.
Dzięki rozwojowi układów mikroelektroniki są one konkurencyjne cenowo i niezawodne, a dzięki uzależnieniu działania od wprowadzonego programu i dzięki
Komputer centralny Układ sterowania | numerycznego Inne PIC
Sfnlhl
worane
I_
Interfejs I ~ Iteiuniuiniilaą.fiTj |
Ukars&raaang
śliniłam
tfetamyiń
t
_____ _____
I Ucoj myśc Uboia^
1 J ilgj^ UcaJmnc
l Erseowic* i pEĘOMry-

t

Pteijrsi-stnr PLC

flBRmnifca PLC
131
Wyszukiwarka
Podobne podstrony:
53262 P1080284 7. Napędy robotów przemysłowych - siła przyciągająca ruchomy prowad
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80 Rysun
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
P1080236 5. Sterowanie robotów przemysłowych 3. Sterowanie w osiach pozycjonowanyc
P1080243 Il Sterowanie robotów przemysłowych modułowej budowie są wygodne do aplikacji, diagnozowani
więcej podobnych podstron