53262 P1080284

7. Napędy robotów przemysłowych
- siła przyciągająca ruchomy prowadnik (część pierwotną) do nieruchomych prowadnic działa tylko wówczas, gdy jest włączone zasilanie, silniki asynchroniczne cechuje duże zapotrzebowanie prądowe, wynikające z prądu magnesującego.
Natomiast napędy liniowe z trójfazowym silnikiem synchronicznym charakteryzują się tym, że:
- stosunek siły napędowej do masy silnika jest o 50-5-100% większy niż silników asynchronicznych,
- następuje niewielkie nagrzewanie się części wtórnej (statora silnika),
- po wyłączeniu napędu cały czas występuje siła przyciągająca ruchomy prowadnik (część pierwotną) do nieruchomych prowadnic,
- proste algorytmy, pełniące funkcję regulatora, wystarczają do sterowania pracą silnika, dzięki czemu możliwe jest stosowanie wyższych częstotliwości próbkowania.
7.4.5. Napędy z silnikami skokowymi
Silnik skokowy, zwany także silnikiem krokowym, przetwarza ciąg impulsów sterujących na ciąg obrotów kątowych. Kąt obrotu wirnika jest proporcjonalny do liczby impulsów sterujących, a prędkość obrotowa - do częstotliwości tych impulsów. Silniki skokowe są stosowane przede wszystkim w tych robotach, których obciążenie jest stosunkowo niewielkie. Silniki skokowe mogą pracować w układzie otwartym sterowania, bez kontroli wykonanego położenia, ponieważ po każdym impulsie sterującym wirnik wykonuje obrót o ściśle określony kąt. Wartość tego kąta, odpowiadającego pojedynczemu impulsowi sterującemu, nazywana jest skokiem lub krokiem silnika. Układ z silnikami skokowymi reaguje na serię impulsów, tak że wykonywany ruch o dokładnie określonej liczbie skoków odpowiada ściśle liczbie impulsów.
Ze względu na zasadę działania i cechy konstrukcyjne silniki skokowe można podzielić na trzy zasadnicze grupy [1]:
- silniki o wirniku biernym (reluktancyjne) z momentem reluktancyj-nym,
- silniki o wirniku czynnym (prawie wyłącznie maszyny magnetoelek-tryczne), wykorzystujące moment synchroniczny wzbudzeniowy,
- silniki hybrydowe, wykorzystujące zarówno moment synchroniczny, jak i moment reluktancyjny.
Na rysunku 7.25 jest pokazana zasada działania trójfazowego silnika skokowego reluktancyjnego o sześciu biegunach na stojanie. Układ faz składa się z uzwojeń sterowania fazy pierwszej (//, 12), fazy drugiej (2h 2i) i fazy trzeciej
(3,t32)'
Kiedy prąd pojawi się w uzwojeniach 7/, J2 fazy pierwszej, wirnik zajmuje pozycję I (rys. 7,25a), w której wartość reluktancji dla strumienia magnetycz* 214 nego jest minimalna. Gdy w następnej chwili prąd występuje w uzwojeniach lh
^ pierwszej i jednocześnie w 2/, 22 fazy drugiej, wirnik zajmie położenie h ^tóie D (rys. 7.25b). Następnie w paśmie 7/, 12 nie ma już prądów i wirnik p^^ałaniem sił pola magnetycznego od prądów w uzwojeniach 2h 2? zajmuje jje Ul (rys. 7.25c) itd. Następne zmiany prądów powodują kolejne zmia--i/cji wirnika (rys. 7.25d —»rys. 7.25e —> rys. 7.25ft.
iB
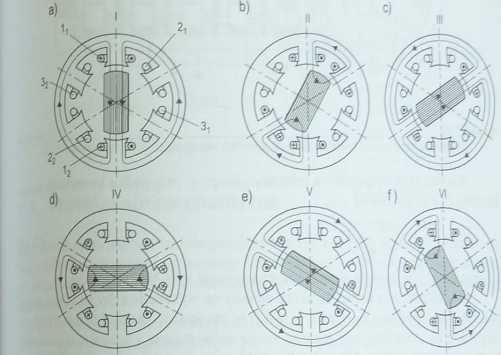
Rysunek 7.25^___
Zasada działania trójfazowego reluktancyjnego silnika skokowego [1]
W celu polepszenia charakterystyk silniki skokowe są wykonywane ze zwiększoną liczbą faz: czterofazowe, pięciofazowe (i nawet z większą ilością faz), ponieważ ze wzrostem liczby faz maszyny elektrycznej zwiększają się moment obrotowy i liczba skoków na jeden obrót (to znaczy maleje wartość skoku znamionowego).
Struktura Seźterofazowego silnika skokowego jest pokazana na rys. 7.26. Silnik zawiera osiem biegunów wydatnych z ulokowanymi na każdym z nich trzema zębami oraz 30 zębów na wirniku. Silnik ten może realizować pracę peł-noskokowąz komutacją: 1-2-3-4-1-... (komutacja czterotaktowapojedyncza) lub /, 2-2, 3-3, 4-4, 1-1, 2-... (komutacja czterotaktowa parowa syme-tiyczna), półskokową: 1-1, 2-2-2, 3-3-3, 4-4-4, 1-1-... (komutacja ośmio-taktowa parowa niesymetryczna) oraz inny rodzaj pracy z odpowiednio zmie-uiającąsię kombinacją włączonych grup faz: 1,2-1,2,3-2,3-2,3,4-3,4-3,4, H*mm itd.
21
Wyszukiwarka
Podobne podstrony:
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
81406 P1080290 7. Napędy robotów przemysłowych 7.5.3.I. Przekładnie planetarne Przekładnia planetarn
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
45696 P1080272 7. Napędy robotów przemysłowych go są obecnie powszechnie stosowane w robotyce. Jedna
19627 P1080242 5. Starowanie robotów przemysłowych Sterowanie przyciskowe jest zbliżone do programow
73038 P1080282 7. Napędy robotów przemysłowych o stałej amplitudzie i zwykle stałym okresie oraz mod
więcej podobnych podstron