224 (60)
224
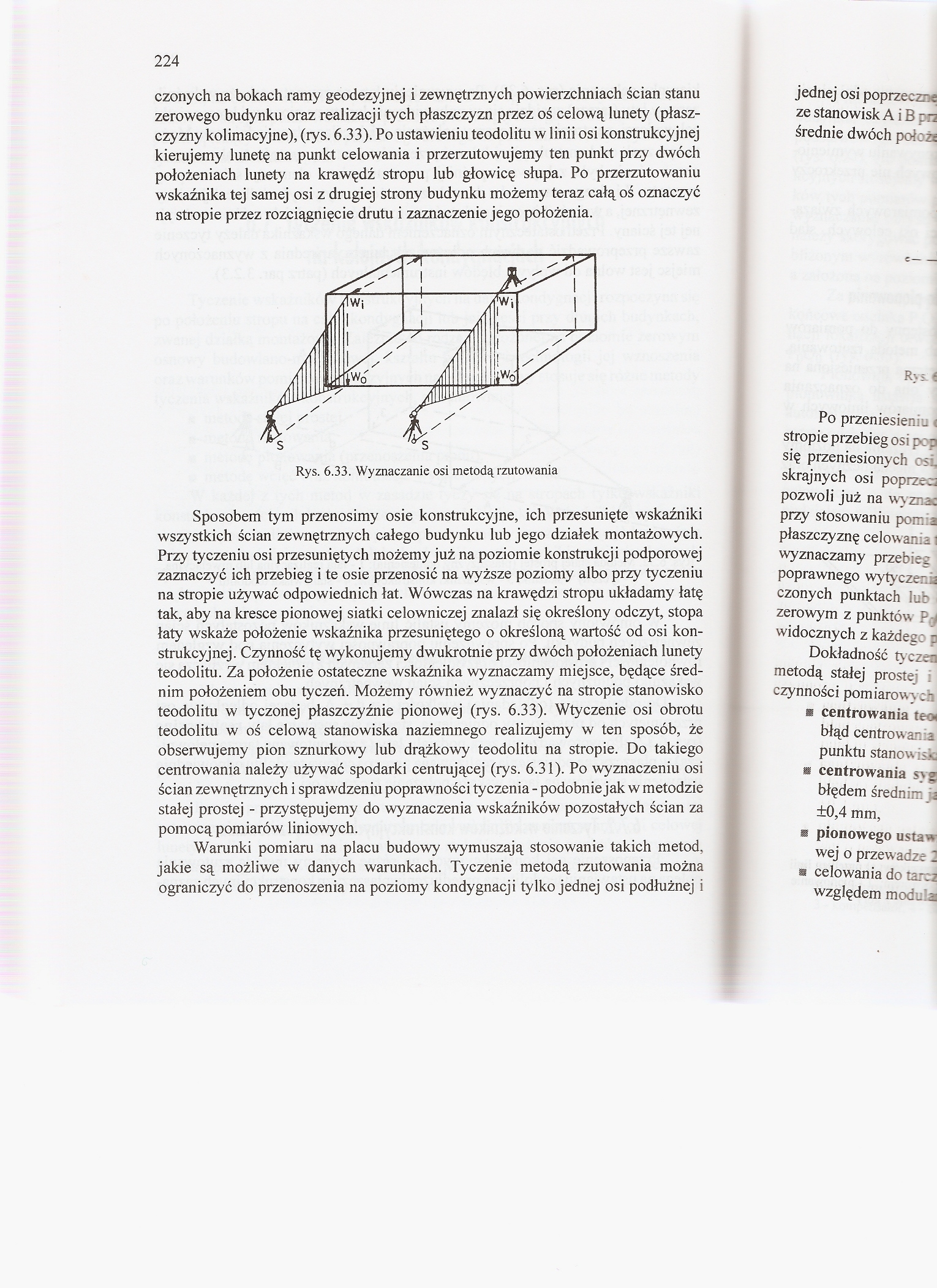
czonych na bokach ramy geodezyjnej i zewnętrznych powierzchniach ścian stanu zerowego budynku oraz realizacji tych płaszczyzn przez oś celową lunety (płaszczyzny kolimacyjne), (rys. 6.33). Po ustawieniu teodolitu w linii osi konstrukcyjnej kierujemy lunetę na punkt celowania i przerzutowujemy ten punkt przy dwóch położeniach lunety na krawędź stropu lub głowicę słupa. Po przerzutowaniu wskaźnika tej samej osi z drugiej strony budynku możemy teraz całą oś oznaczyć na stropie przez rozciągnięcie drutu i zaznaczenie jego położenia.
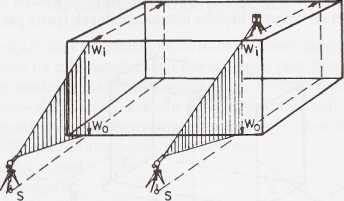
Rys. 6.33. Wyznaczanie osi metodą rzutowania
Sposobem tym przenosimy osie konstrukcyjne, ich przesunięte wskaźniki wszystkich ścian zewnętrznych całego budynku lub jego działek montażowych. Przy tyczeniu osi przesuniętych możemy już na poziomie konstrukcji podporowej zaznaczyć ich przebieg i te osie przenosić na wyższe poziomy albo przy tyczeniu na stropie używać odpowiednich łat. Wówczas na krawędzi stropu układamy łatę tak, aby na kresce pionowej siatki celowniczej znalazł się określony odczyt, stopa łaty wskaże położenie wskaźnika przesuniętego o określoną wartość od osi konstrukcyjnej. Czynność tę wykonujemy dwukrotnie przy dwóch położeniach lunety teodolitu. Za położenie ostateczne wskaźnika wyznaczamy miejsce, będące średnim położeniem obu tyczeń. Możemy również wyznaczyć na stropie stanowisko teodolitu w tyczonej płaszczyźnie pionowej (rys. 6.33). Wtyczenie osi obrotu teodolitu w oś celową stanowiska naziemnego realizujemy w ten sposób, że obserwujemy pion sznurkowy lub drążkowy teodolitu na stropie. Do takiego centrowania należy używać spodarki centrującej (rys. 6.31). Po wyznaczeniu osi ścian zewnętrznych i sprawdzeniu poprawności tyczenia - podobnie jak w metodzie stałej prostej - przystępujemy do wyznaczenia wskaźników pozostałych ścian za pomocą pomiarów liniowych.
Warunki pomiaru na placu budowy wymuszają stosowanie takich metod, jakie są możliwe w danych warunkach. Tyczenie metodą rzutowania można ograniczyć do przenoszenia na poziomy kondygnacji tylko jednej osi podłużnej i
jednej osi poprzeczną ze stanowisk A i B pa średnie dwóch położł
Rys- i
Po przeniesieniu i stropie przebieg osi pop się przeniesionych osi skrajnych osi popized pozwoli już na wy zna* przy stosowaniu pomii płaszczyznę celowania 1 wyznaczamy przebieg' poprawnego wytyczeni^ czonych punktach lub i zerowym z punktów P^ widocznych z każdego g Dokładność tyczea metodą stałej prostej i czynności pomiarowych
■ centrowania teo błąd centrowania punktu stanowisk
■ centrowania syg błędem średnim ja ±0,4 mm,
a pionowego ustaw wej o przewadze i m celowania do tarci względem moduły
Wyszukiwarka
Podobne podstrony:
IMGE47 Edmund Wnuk-Lipiński 224 ujęciu na poziomie mikrostruktur wykształcają się - obok takich uniw
Zdjęcie0076 (8) Współrzędne prostokątne ramy geodezyjnej według danych zawartych na szkicu lokalizac
41599 Zdjęcie0076 (8) Współrzędne prostokątne ramy geodezyjnej według danych zawartych na szkicu lok
56568 P1070878 60 broszowaną srebrem we wzór gwiaździsty, Turcja w. XVIII, na bokach wzór pasowy, 2.
DSCN0594 5. Obliczeniu wytrzymałościowe projektowe i sprawdzające 224 lub na próbnych kolach zębatyc
Slajd19 (136) Politechnika WrocławskaPASY ZIELENIa) Ekran szerokości 30 mb) Ekran szerokości 60 m Uk
Ankieta - uczestnicy 118 szkół 60 odpowiedzi z 28. uczestniczących w Olimpiadzie Wiedzy Geodezyjnej
Geodezja i kartografia na UP w Lublinie Geodezyjne pomiary szczegółowe, Katografia, Systemy odniesie
IMG!76 (5) Zespoły paraneoplas tyczne2, Objaw Lesera * Trelata ; Początek choroby ók 60 rojku, życia
page0277 273 o które teorya rozbićby się mogła, zajmiemy się wyświetleniem, 0 ile
§ 19. 1 Przebieg granic działek ewidencyjnych wykazuje się w ewidencji na podstawie dokumentacji geo
Politechnika Wrocławska Dorobek naukowy 60 laureatów I konkursu na stypendia naukowe z funduszu POKL
20684 statystyka skrypt�03 Przykład /. / Zmierzono grubość n = 60 podkładek wykonanych na automacie
więcej podobnych podstron