250 (29)
250 71 Dobór wst9PnY konstrukcyjnych parametrów maszyn
Od liczby Q„ oraz od wymiarów żłobka zależy, przy zadanej średnicy dr wirnika, minimalna szerokość zęba, a więc maksymalna indukcja oraz maksymalne naprężenie mechaniczne w zębie.
Dobierając liczbę żłobków Qr, trzeba zatem brać pod uwagę:
— zapewnienie bliskiego do sinusoidy rozkładu pola magnetycznego w maszynie nie obciążonej;
— uzyskanie dużego zapełnienia miedzią strefy żłobkowo-zębowej;
— zapewnienie wytrzymałości mechanicznej wirnika przy probierczej prędkości obrotowej;
— zapewnienie dobrego odprowadzania ciepła z uzwojenia wzbudzającego.
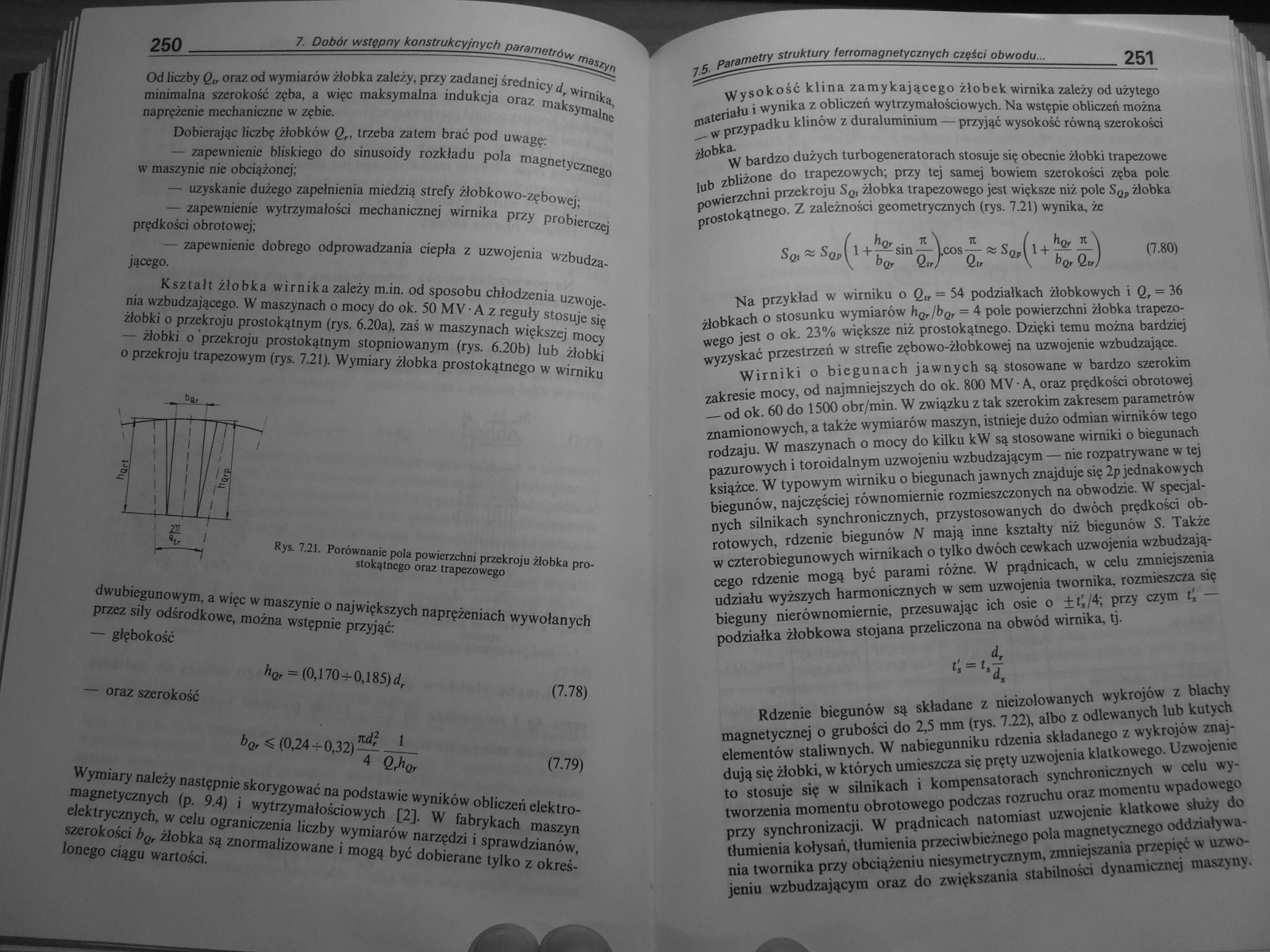
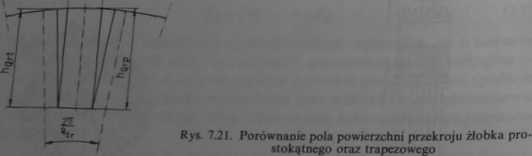
Kształt żłobka wirnika zależy m.in. od sposobu chłodzenia uzwojenia wzbudzającego. W maszynach o mocy do ok. 50 M V • A z reguły stosuje się żłobki o przekroju prostokątnym (rys. 6.20a), zaś w maszynach większej mocy — żłobki o 'przekroju prostokątnym stopniowanym (rys. 6.20b) lub żłobki o przekroju trapezowym (rys. 7.21). Wymiary żłobka prostokątnego w wirniku
bi
dwubiegunowym, a więc w maszynie o największych naprężeniach wywołanych przez siły odśrodkowe, można wstępnie przyjąć:
— głębokość
ii i (0,170 + 0,185)4. (7.78)
— oraz szerokość
V< (124*032)^^ ||
Wymiary należy następnie skorygować na podstawie wyników obliczeń elektromagnetycznych (p. 9.4) i wytrzymałościowych (2J. W fabrykach maszyn elektrycznych, w celu ograniczenia liczby wymiarów narzędzi i sprawdzianów, szerokości bQr żłobka są znormalizowane i mogą być dobierane tylko z określonego ciągu wartości.
251
7 5 Parametry struktury ferromagnetycznych części obwodu...
Wysokość klina zamykającego żłobek wirnika zależy od użytego materiału i wynika z obliczeń wytrzymałościowych. Na wstępie obliczeń można w przypadku klinów z duraluminium — przyjąć wysokość równą szerokości żłobka.
W bardzo dużych turbogeneratorach stosuje się obecnie żłobki trapezowe lub zbliżone do trapezowych; przy tej samej bowiem szerokości zęba pole powierzchni przekroju Sq, żłobka trapezowego jest większe niż pole SQr żłobka prostokątnego. Z zależności geometrycznych (rys. 7.21) wynika, że
S0l* S0.l 1 +7^sin-^- Lcos—- ss S,
bor Q,trJ Qlr
3QP
(7.80)
Na przykład w wirniku o Q„ = 54 podziałkach żłobkowych i Q, = 36 żłobkach o stosunku wymiarów h^/bg, = 4 pole powierzchni żłobka trapezowego jest o ok. 23% większe niż prostokątnego. Dzięki temu można bardziej wyzyskać przestrzeń w strefie zębowo-żłobkowęj na uzwojenie wzbudzające.
Wirniki o biegunach jawnych są stosowane w bardzo szerokim zakresie mocy, od najmniejszych do ok. 800 MV-A, oraz prędkości obrotowej — od ok. 60 do 1500 obr/min. W związku z tak szerokim zakresem parametrów znamionowych, a także wymiarów maszyn, istnieje dużo odmian wirników tego rodzaju. W maszynach o mocy do kilku kW są stosowane wirniki o biegunach pazurowych i toroidalnym uzwojeniu wzbudzającym — nie rozpatrywane w tej książce. W typowym wirniku o biegunach jawnych znajduje się 2p jednakowych biegunów, najczęściej równomiernie rozmieszczonych na obwodzie. W specjalnych silnikach synchronicznych, przystosowanych do dwóch prędkości obrotowych, rdzenie biegunów N mają inne kształty niż biegunów S. Także w czterobiegunowych wirnikach o tylko dwóch cewkach uzwojenia wzbudzającego rdzenie mogą być parami różne. W prądnicach, w celu zmniejszenia udziału wyższych harmonicznych w sem uzwojenia twomika, rozmieszcza się bieguny nierównomiernie, przesuwając ich osie o ±t',/4; przy czym l', — podziałka żłobkowa stojana przeliczona na obwód wirnika, tj.

t',
Rdzenie biegunów są składane z nieizolowanych wykrojów z blachy magnetycznej o grubości do 2,5 mm (rys. 7.22), albo z odlewanych lub kutych elementów staliwnych. W nabiegunniku rdzenia składanego z wykrojów znajdują się żłobki, w których umieszcza się pręty uzwojenia klatkowego. Uzwojenie to stosuje się w silnikach i kompensatorach synchronicznych w celu wytworzenia momentu obrotowego podczas rozruchu oraz momentu wpadowego przy synchronizacji. W prądnicach natomiast uzwojenie klatkowe służy do tłumienia kołysań, tłumienia przeciwbieżnego pola magnetycznego oddziaływania twomika przy obciążeniu niesymetrycznym, zmniejszania przepięć w uzwojeniu wzbudzającym oraz do zwiększania stabilności dynamicznej maszyny.
Wyszukiwarka
Podobne podstrony:
DSCF1268 7. DOBÓR WSTĘPNY KONSTRUKCYJNYCH PARAMETRÓW MASZYN PRĄDU PRZEMIENNEGO 7.1. Parametry wyzysk
232 (39) 232 7. Dobór wstępny konstrukcyjnych parametrów maszyn — zwiększająca się
234 (36) 234 7. Dobór wstępny konstrukcyjnych parametrów maszyn w którym szczelina zastępcza 5"
262 (29) 202_7. Dobór wstępny konstrukcyjnych parametrów, kowe przeplecenie w obszarze każdego z poł
220 (39) 220 _7 Dobór wstępny konstrukcyjnych parametrów m*sz 220 _7 Dobór wstępny konstrukcyjnych p
222 (56) yyp _ 7. Dobór wstępny konstrukcyjnych parametrów w której: S - 6.4 ■ 10* kg/m3; dr — zewnę
224 (42) 224 7. Dobór wstępny konstrukcyjnych parametrów 224 7. Dobór wstępny konstrukcyjnych
226 (39) 226 7. Dobór wstępny konstrukcyjnych parametrów/ Rys. 7.12. Wartości indukcji w szczelinie
230 (40) 230 7. Dobór wstępny konstrukcyjnych parametrów ao&n Maszyny synchroniczne natomia
236 (36) 236 7. Dobór wstępny konstrukcyjnych parametrów ">atzyn w stajanie. Długość pa
240 (33) 240 7. Dobór wstępny konstrukcyjnych parametrów 240 7. Dobór wstępny konstrukcyjnych parame
246 (35) 24g_ 7 Dobór wstępny konstrukcyjnych parametrów mas*,* Ze względów technologicznych średnic
248 (35) 248 7. Dobór wstępny konstrukcyjnych parametrów /w..r C. W wielobiegunowych maszynach dużej
254 (32) 254 7. Dobór wstępny konstrukcyjnych parametrów o o Rys. 724. Zarys nabiegunnika ukształtow
256 (33) 256 sinusoidai. 7. Dobór wstępny konstrukcyjnych parametrów. W celu osłabienia pulsacji żło
258 (30) 258 7. Dobór wstępny konstrukcyjnych parametrów Tablica 7.11. Dobie rodzmjm uwojniń (nornik
260 (28) 260 260 Dobór wstępny konstrukcyjnych parametrów f
więcej podobnych podstron