290 (33)

A =
-1
(XI 1.49)
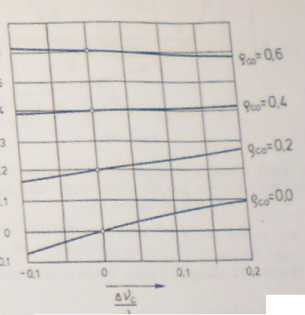
Rys. XII.10. Reakcyjność
prędkości według [44]
462
Podstawiając (XII-41) i (XI 1.42) do (XII.40) znajdujemy
_ gc-iVn-g,)-rv?-2pvtV l-g^COSZ, (XI 1.44)
0—ff«A* |tf, + <rł(l-«ł)+if-2f»łV'|-fłco»j,),
Jest to równanie przestępne, można je rozwiązać metodą numeryczną lub przybliżoną.
Oznaczając
|
e, - g<o+Aet, “ reO + A\ i zakładając małe przyrosty |
(X11.45) | |
|
(Aqc)2 * 0, Aoe-Ave * 0 |
(X11.46) | |
|
oraz przyjmując |
9 = <Po» *i ** *i® |
(XI 1.47) |
|
otrzymamy przybliżoną formę równania (XII.44) | ||
|
dvX . „dV,Tl Aqc — (1 — Qe0)— A — B— 1 |
(XII.48) | |
|
*rO 1 rfO 1 ł | ||
określającą zależność zmiany reakcyjności od zmiany wskaźnika prędkości:
Aq, =/(dve).
Występujące w równaniu (XI 1.48) stałe wynoszą:
2
((p-vcj l-Lvc°sa,-vf)0
Przyjmując przykładowo <p0cosa,0 = °’935-
otrzymuje się współczynniki A, B jako funkcję reakcyjności obliczeniowej (rys. XII.9). Korzystając ze współczynników A, B według rysunku XII.9 obliczono za pomocą wzoru (XI (.48) reakcyjność w funkcji zmiany wskaźnika prędkości (rys. XII. 10).

veo
stopnia w funkcji zmiany wskaźnika
463
Dla niewielkich zmian wskaźnika V,, gdy
-0,1 < — < 0,2 v«o
(jak na rysunku XII.10), linie
/ <pcosg,\
ve0
oc(dvc) można aproksymować prostymi
AQt = (0,5-Gco) (1 “<?«o)—• v*o
(Xll.50)
Wyszukiwarka
Podobne podstrony:
50 (290) Z przebiegu charakterystyk mechanicznych (rys. 23.10) układów stabilizacji prędkości kątowe
img027 3 Rys. 2-16 O 10 kN -1,11 yw=3-78 or3-270° <y.lx.^Qf1 = 240o (xi=2, y-i=-i) (x3=-3,y3=-2)
Image 45 49 Rys. 3.10. Ogólna budowa pneumatycznego zespołu napędowego z hamulcem [6] 3.4.2. Urządze
IMG00049 49 49 Rys. 4.2.10. Poprzeczne wymiary wieńca: a) jednorzędowego; b) dwurzędowego; c)
IMG00277 -V- -V- Rys. 14.10.5b 36 Loż.st.30308 2 PN-ISO 355 35 Loż.st.30310 2 PN-ISO
img046 (40) 46 Rys. 49 Rys. 50 Rys. 51 i Ruletki (tasiemki) - rysunek 51 - są to wstęgi stalowe lut
skanuj0024 Rys. 25.10. Urządzenie do samoczynnego odprowadzania przedmiotów oszlifowanych na
skanuj0268 (4) Rys. 11.10. Obwiedniowe nacinanie uzębień: a) struganie metodą Maaga, b) dłutowanie m
IMG238 238 238 Rys. 19.10 W ykr03 wektorowy do przykładu 19.6.8 - reaktancja indukcyjna jednej fazy
14 % Rys, nr 10_Zmiany cen paliw - 2000 r. = 100 Wzrost cen paliw kopalnych takich jak olej i gaz zi
15 Rys, nr 10 Koszt wyprodukowanego 1 GJ ciepła Promocja regionów przyjaznych dla środowiska natural
więcej podobnych podstron