27 (84)
podwojoną liczbę kotwic - do 24. Część z nich utrzymuje dźwig nieruchomo względem dna, natomiast pozostałe są, za pomocą holowników kotwiczących, asystujących dźwigowi, przewożone w inne miejsca i rzucane na dno. Poprzez wybieranie wciągarkami lin łączących te kotwice z dźwigiem uzyskuje się możliwość powolnego przemieszczania się tego ostatniego w wybranym kierunku. Taka odmiana dynamicznego kotwiczenia pokazana jest na rysunku 38. Podobne rozwiązanie stosowane jest na pogłębiarkach.
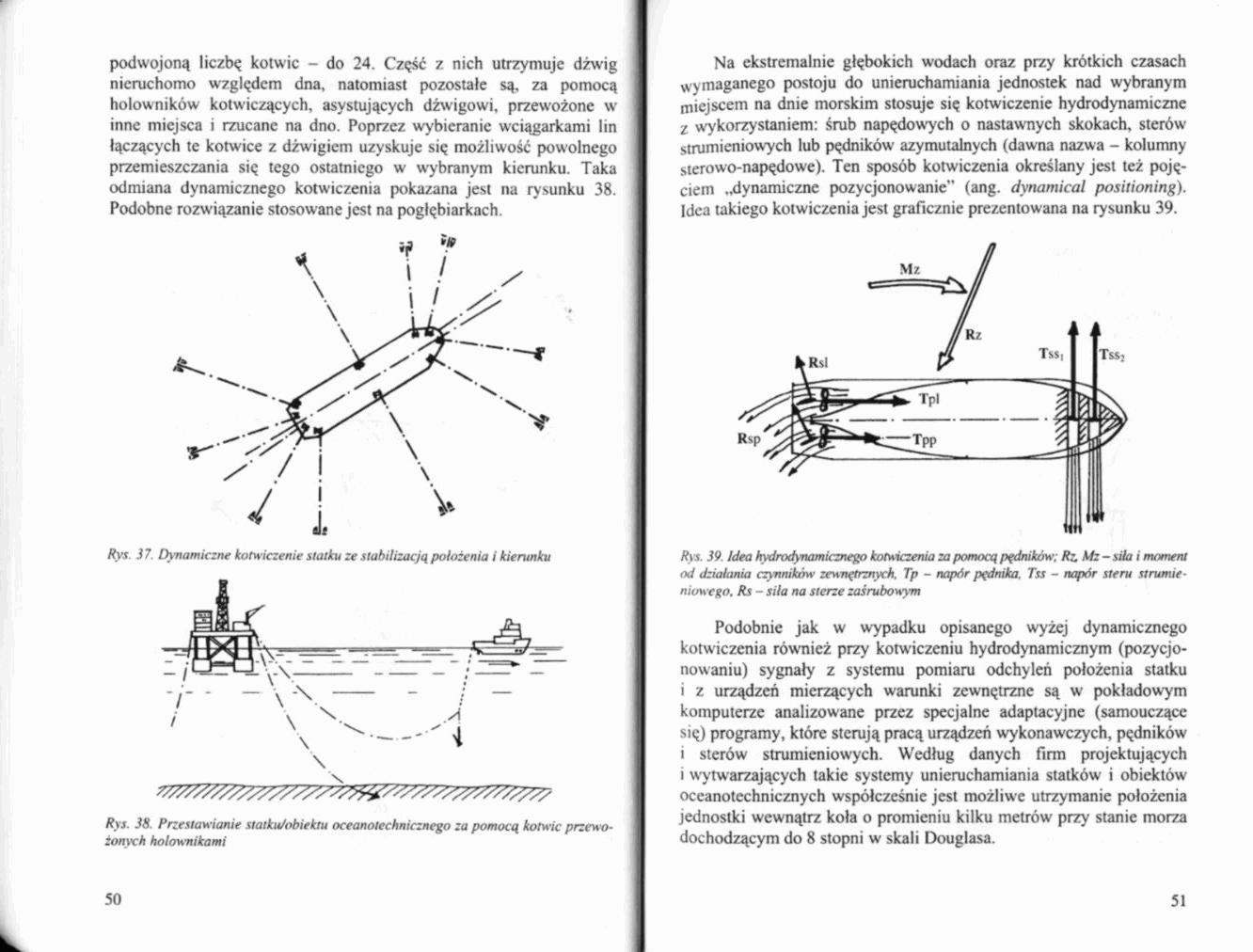
Rys 37 Dynamiczne kotw iczenie statku ze stabilizacją położenia i kierunku

\
Rys. 38 Przestawianie statku/obiekru oceanotechnicznego za pomocą kotwic przewożonych holownikami
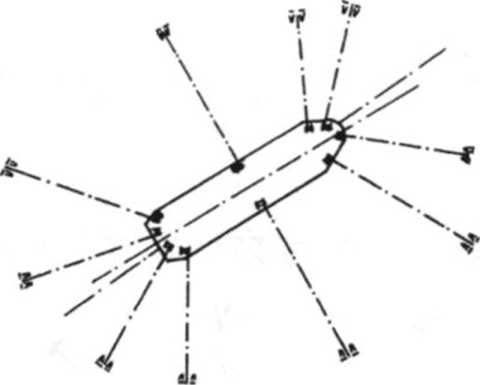
Na ekstremalnie głębokich wodach oraz przy krótkich czasach wymaganego postoju do unieruchamiania jednostek nad wybranym miejscem na dnie morskim stosuje się kotwiczenie hydrodynamiczne z wykorzystaniem: śrub napędowych o nastawnych skokach, sterów strumieniowych lub pędników azymutalnych (dawna nazwa - kolumny sterowo-napędowe). Ten sposób kotwiczenia określany jest też pojęciem „dynamiczne pozycjonowanie" (ang. dynamical positioning). Idea takiego kotwiczenia jest graficznie prezentowana na rysunku 39.
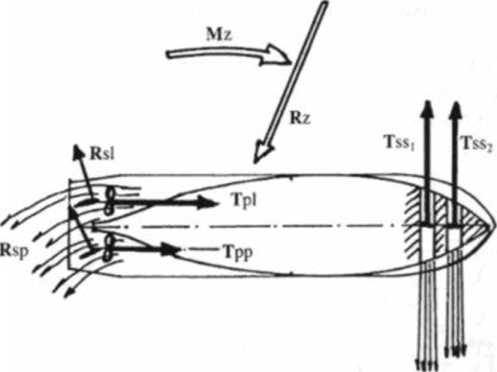
Rys. 39. Idea hydrodynamicznego kotwiczenia za pomocą pędników. Rz. Mz-siła i moment od działania czynników zewnętrznych, Tp - napór pędnika. Tss - napór steru strumieniowego. Rs - siła na sterze zaśrubowym
Podobnie jak w wypadku opisanego wyżej dynamicznego kotwiczenia również przy kotwiczeniu hydrodynamicznym (pozycjonowaniu) sygnały z systemu pomiaru odchyleń położenia statku i z urządzeń mierzących warunki zewnętrzne są w pokładowym komputerze analizowane przez specjalne adaptacyjne (samouczącc się) programy, które sterują pracą urządzeń wykonawczych, pędników i sterów strumieniowych. Według danych firm projektujących i wytwarzających takie systemy unieruchamiania statków i obiektów oceanotechnicznych współcześnie jest możliwe utrzymanie położenia jednostki wewnątrz koła o promieniu kilku metrów przy stanie morza dochodzącym do 8 stopni w skali Douglasa.
51
Wyszukiwarka
Podobne podstrony:
84. SARBA, Beata Przygotowanie do ustalenia zasad // Katecheta. - 2000, nr 12, s.
21429 ZT013 (3) 24 CZĘŚĆ 1. ZARZĄDZANIE SYSTEMEM TURYSTYKI w odniesieniu do turystyki. Takie podejśc
Poznaj C++ w$ godziny0082 68Godzina 5 14: cout « "Podaj liczbę od 0 do 10,000
34 CZĘŚĆ I PRZYGOTOWANIE DANYCH DO ANALIZY dwóch poziomach, zwiększamy liczbę grup do ośmiu, zatem
24 CZĘŚĆ PRZYGOTOWANIE DANYCH DO ANALIZY stanowi wymyślenie problemu badawczego i zadanie pytania
85177 PrepOrg II109 (2) - 112 - 84. m-DWUNITROBENZEN Sprawdziła: T. Doroz Do kolby kulistej o pojemn
image43 24 Część pierwsza • Podstawowe pojęcia i problemy Tadeusz Lewowicki • Prot serca i zrozumien
więcej podobnych podstron