34 (493)

jącą na zasadzie Fostera i generującą dwie wiązki poszukujące (na Zachodzie takie radary, tyle że większych rozmiarów, są produkowane od lat 60. ub. wieku).
Nową jakość mogło zapewnić zastosowanie ścianowych anten z siecią przekaźników o polaryzacji fazowej. W ZSRR takie konstrukcje powstawały nawet wcześniej niż w innych krajach, aie palma pierwszeństwa w zastosowaniu ich do rozpoznania artyleryjskiego należy do Stanów Zjednoczonych - koncern Hughes od 1975 r. testował radar artyleryjski AN/TPQ-36 z taką właśnie anteną, pracujący w paśmie X. Dla szybszego przetwarzania informacji o celach zastosowano w nim, bardzo wówczas nowoczesny, cyfrowy procesor AN/UIK-15.
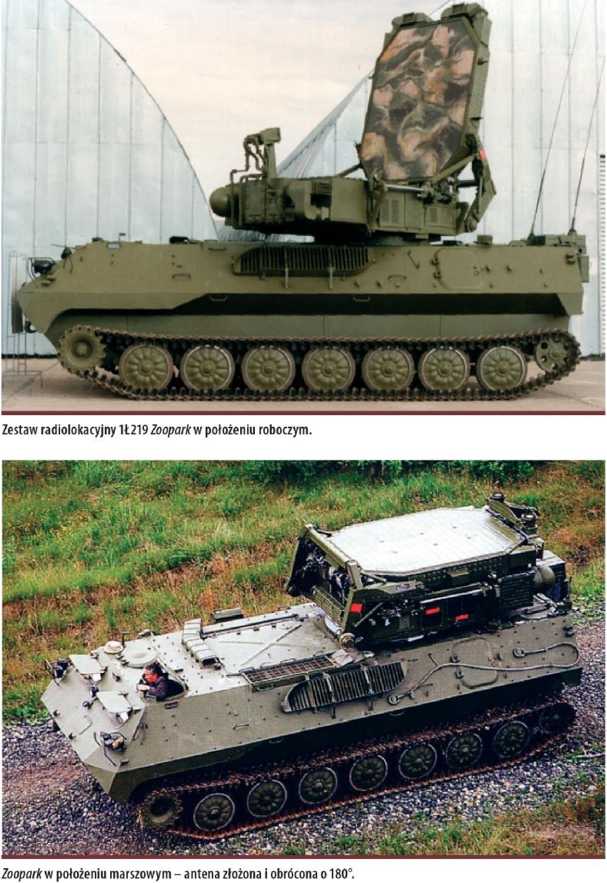
W Nil Strieła prace nad podobnym systemem radiolokacyjnym rozpoczęto w 1980 r. pod kierunkiem W. Simaczewa. Zakładano początkowo, że będzie to po prostu Ryś ze ścianową anteną, aie wymagania wobec urządzenia szybko rosły, pojawiały się także nowe możliwości, związane z miniaturyzacją podzespołów elektronicznych. Ostatecznie ARK Zoopark, czyli 1Ł219 przyjęto na uzbrojenie dopiero w 1992 r. i zaprezentowano publicznie rok później, na fali jelcynowskiej beztroski, kiedy instytuty i fabryki mogły uzyskać jakiekolwiek środki jedynie eksportując swe produkty.
Najważniejszą częścią systemu jest trójwspół-rzędny, monoimpulsowy radiolokator 1Ł259, pracujący w centymetrowym paśmie H, w którego antenie zamontowano 104 moduły, złożone w sumie z 3328 przesuwników fazowych. Oświetlacz umieszczono przed płaszczyzną anteny, która jest ustawiona pod stałym kątem 17° od pionu i może obracać się w zakresie 360°. W każdym położeniu skanuje elektronicznie sektor w zakresie 60° w poziomie i 40° w pionie. W trybie poszukiwania wiązka ma wymiary 60°x1,8°, w trybie korygowania ognia (gdy lokalizacja stanowisk ogniowych jest znana) - 16°x1,8°. Zoopark może wciągu minuty określić 20 pozycji środków ogniowych i śledzić w trybie ciągłym cztery cele. Dane z radiolokatora są przetwarzane przez komputer Sajwer-2, który automatycznie określa ich współrzędne i odległość względem pojazdu, a po uwzględnieniu danych podawanych przez aparaturę radionawigacyjną Majak, określa współrzędne geograficzne i dowiązuje położenie celu do mapy. Średni błąd określenia pozycji wynosi 30 m. Ostateczne dane są automatycznie przekazywane na stanowisko dowodzenia własnej artylerii.
Maksymalny zasięg wykrywania stanowisk moździerzy wynosi 15 km, haubic 10 km, wyrzutni

Kolejne zdjęcia pokazujące 1Ł219 w położeniu rozwiniętym - na wystawie MAKS... ...i w terenie.

Wyszukiwarka
Podobne podstrony:
III. Podsumowanie Na podstawie wszystkich dostępnych bilansów i sprawozdań finansowych omawianej
img214 72 Rozdział III. Działania na tekście 72 Rozdział III. Działania na tekście Między
2. Wymagania ogólne na poszczególne oceny punktowe w kl. I-III: a) wymagania na 0
— ODDDDODDO £=%/ flrftMMiinkn, J /M III IV r. na SO-MO-urlilr riri-Łlr W \ a
III Oznaczenia na odczynnikach. Studenci rzadko spotykają się z odczynnikami w oryginalnych opakowan
> IN III Al NA KOMIS IA IG/AMINAlWNA A tn< IWHM* pinwmi « h»i*ii»i>
Co o haczyku wiedzieć należy III Z NAMI NA RYBY Uniwersalne modele, których najczęściej używam czy ż
d04 11. Tlenek chromu (III) stapiany na powietrzu (utleniany) z wodorotlenkiem potasu utlenia się do
sa7 KSIĘGA PIERWSZA, ROZDZIAŁ I 17 Adriatyckim w ks. III, znowu na Sycylijskim w V, a na Tyrreńskim
TRANSITION W Już wkrótce kolejna edycja przedmiotuINTERNET OF THINGS dla studentów III roku na kieru
VC0015 PaHynKyAyc iII:(coc na • i
więcej podobnych podstron