364 (5)
100
100
25
25 (mf
100
25
25
P ~ 10-
Cg)-'
4444.4
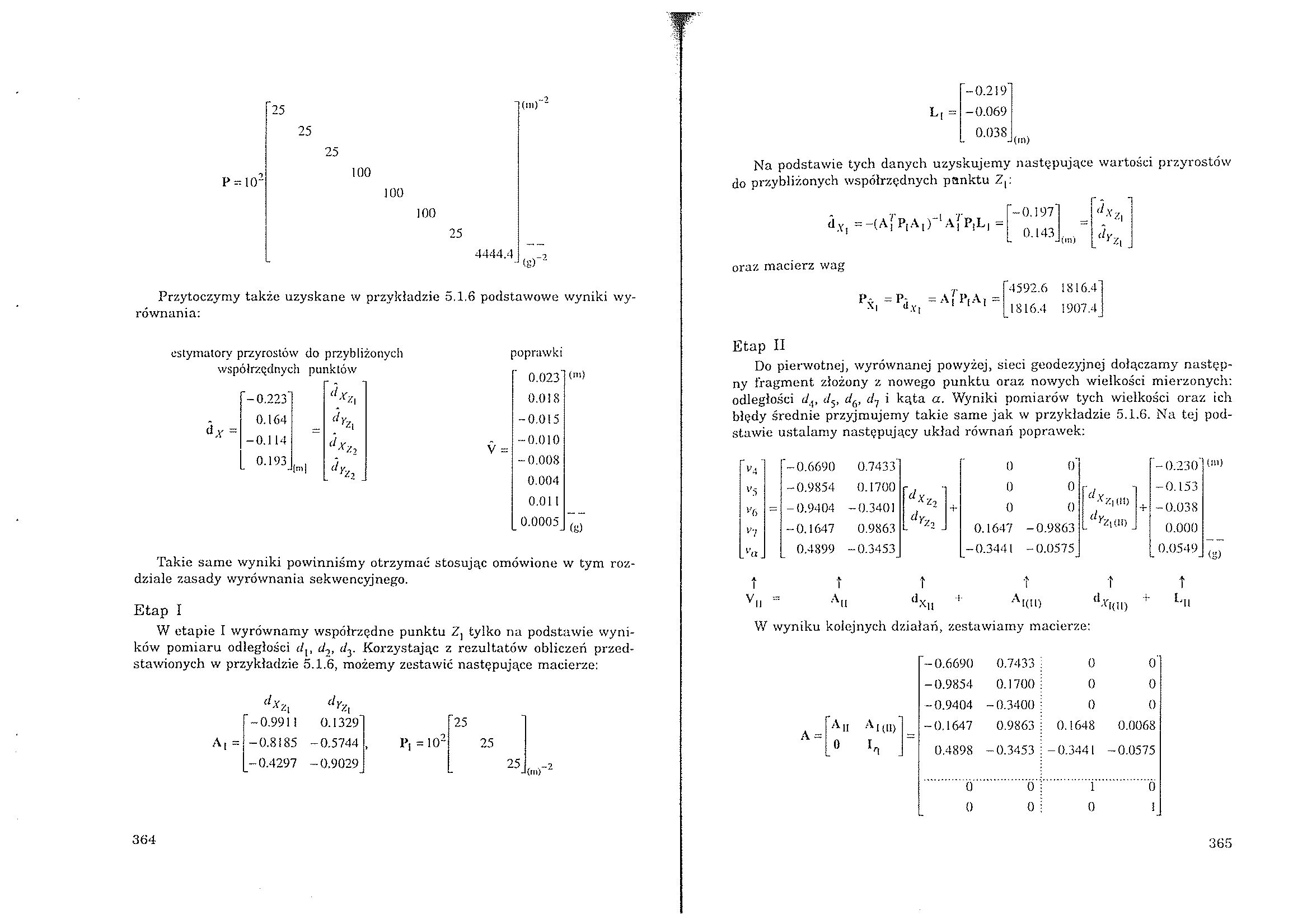
Przytoczymy także uzyskane w przykładzie 5.1,6 podstawowe wyniki wyrównania:
estymatory przyrostów do przybliżonych współrzędnych punktów
|
0.223' |
a** | |
|
0.164 | ||
|
-0.114 | ||
|
0.193 |
H |
/ii, _ |
poprawki
0.023] 0.018 -0.015 -0.010 -0.008 0.004 0.0 It
-0.0005J7;
Takie same wyniki powinniśmy otrzymać stosując omówione w tym rozdziale zasady wyrównania sekwencyjnego.
Etap I
W etapie I wyrównamy współrzędne punktu 2j tylko na podstawie wyników pomiaru odległości dv d0, dy Korzystając z rezultatów obliczeń przedstawionych w przykładzie 5.1.6, możemy zestawić następujące macierze:
|
0.9911 |
0.1329' |
'25 | ||
|
A| = |
-0.8185 0.4297 |
-0.5744 -0.9029 |
, Pj = 102 |
25 25. |
L, =
-0.2 i 9 -0.069 0.038
(m)
Na podstawie tych danych uzyskujemy następujące wartości przyrostów do przybliżonych współrzędnych psnktu Z,:
|
■r f—0.197 |
'dx7. | | |
|
Ai PiL, = |
= | |
|
1 1 1 [ 0.143 |
tm) |
ta J |
oraz macierz wag
Pv. = =a|p,a,
4592.6 1816.4 1816.4 1907.4
Etap II
Do pierwotnej, wyrównanej powyżej, sieci geodezyjnej dołączamy następny fragment złożony z nowego punktu oraz nowych wielkości mierzonych: odległości dĄ, </5> d6, d1 i kąta a. Wyniki pomiarów tych wielkości oraz ich błędy średnie przyjmujemy takie same jak w przykładzie 5.1.6. Na tej podstawie ustalamy następujący układ równań poprawek:
|
*4 |
'-0.6690 |
0.7433* | |
|
vs |
-0.9854 |
0.1700 | |
|
vr> |
= |
-0.9404 |
-0.3401 |
|
V; |
-0.1647 |
0.9863 | |
|
_1'«. |
0.4899 |
-0.3453 |

|
0 |
{)' |
-0.230' | ||
|
0 |
0 |
r! |
-0.153 | |
|
0 |
0 |
*Z|(H) |
T’ |
-0.038 |
|
0.1647 |
-0.9863 |
0.000 | ||
|
-0.3441 |
-0.0575 |
0.0549 | ||
f t t
AI(U) dAj(U) + Lu
W wyniku kolejnych działań, zestawiamy macierze:
|
'-0.6690 |
0.7433 |
0 |
0 |
|
-0.9854 |
0.1700 |
0 |
0 |
|
-0.9404 |
- 0.3400 |
0 |
0 |
|
-0.1647 |
0.9863 |
0.1648 |
0.0068 |
|
0.4898 |
- 0.3453 |
- 0.344 1 |
-0.0575 |
|
0 |
0 |
1 |
0 |
|
0 |
0 |
0 |
i |
365
Wyszukiwarka
Podobne podstrony:
100?81 I Straty miejscowe 1 Straty miejscowe przy wlocie do przewodu ę = o,5 ; = o,25 ę = 0,10-0,06
P4092739 100 1 Runo: Gleba 0-10 cm: 10-25 cm: 25-50 cm: Profil nr 19 Lokalizacja: Sudety Zachodnie,
COACHINGI MF.NTOR1NG W PRAKTYCECZĘSCII. OPROGRAMOWANIE KLIENTA GRUPA 2 - 24-25/10 GRUPA 3-9-10/10 Mi
Image5286 <10, ( O dla X < O, *2/100 dla O < * 1 dla x >10
img072�01 djvu Umie więc już zamieniać 100 jednostek na 10 dziesiątek i na odwrót, czyli Jacek uchwy
skanuj0017 (258) 29) Rp. 0,25 1,0 10,0 )%0 Sol. Adrenalini hydrochlorici Alumini a
skanuj0024 Rys. 25.10. Urządzenie do samoczynnego odprowadzania przedmiotów oszlifowanych na
skanuj0032 (25) Układ nerwowy 18* Tabela 43.1. Wybrane przykłady wyda-[rzeń najbardziej stresogennyc
skanuj0046 (21) 72 B. Cieślar a,At+j
więcej podobnych podstron