53 (110)

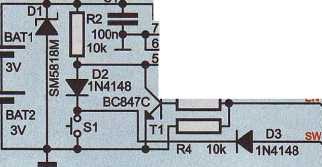
ma stabilizator Rys. 1 pobiera znaczny prąd ok. 50pA, co prawdopodobnie wynika z niezbyt dobrego wewnętrznego podciągnięcia wejścia INHIBIT do masy. Jak można się spodziewać, przycisk SI na początku służy do włączenia stabilizatora.
Pełni on również inne role, ale to dopiero po włączeniu mikrokontrolera. Stąd też konieczne okaza- . ło się zastosowanie dwóch diod . przełączających D2, D3, tranzy-

PBO (XCK/T0) o O O $ P(ADC0) PA0 PB1 (T1) > > > < §(ADC1) PA1
PB2 (INT2/AIN0)
PB3 (OCO/AIN1) PB4 (SS)
PB5 (MOSI)
PB6 (MISO)
PB7 (SCK) RESET
/ en13
Do czego to służy?
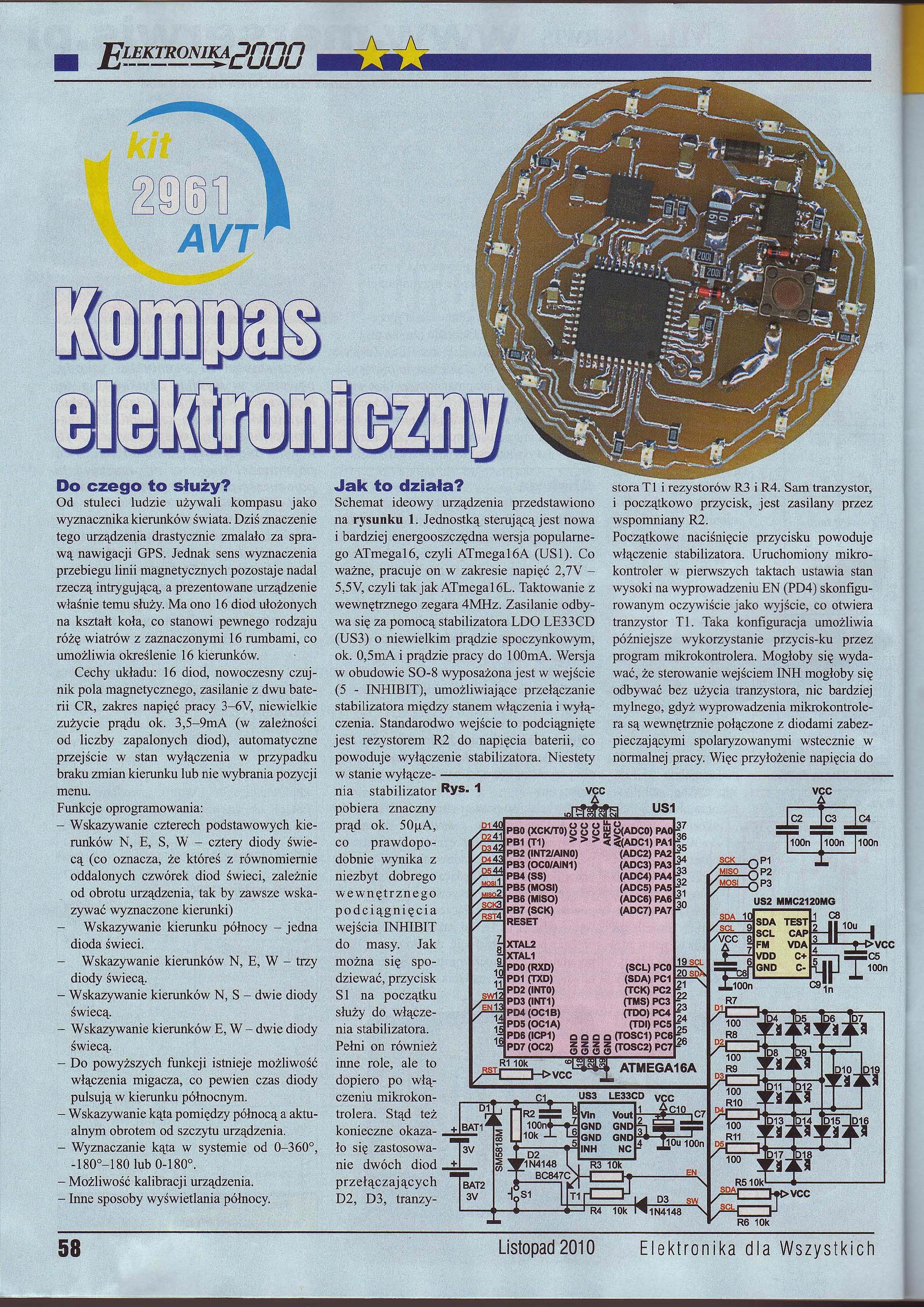
Od stuleci ludzie używali kompasu jako wyznacznika kierunków świata. Dziś znaczenie tego urządzenia drastycznie zmalało za sprawą nawigacji GPS. Jednak sens wyznaczenia przebiegu linii magnetycznych pozostaje nadal rzeczą intrygującą, a prezentowane urządzenie właśnie temu służy. Ma ono 16 diod ułożonych na kształt koła, co stanowi pewnego rodzaju różę wiatrów z zaznaczonymi 16 rumbami, co umożliwia określenie 16 kierunków.
Cechy układu: 16 diod, nowoczesny czujnik pola magnetycznego, zasilanie z dwu baterii CR, zakres napięć pracy 3-6V, niewielkie zużycie prądu ok. 3,5-9mA (w zależności od liczby zapalonych diod), automatyczne przejście w stan wyłączenia w przypadku braku zmian kierunku lub nie wybrania pozycji menu.
Funkcje oprogramowania:
- Wskazywanie czterech podstawowych kierunków N, E, S, W - cztery diody świecą (co oznacza, że któreś z równomiernie oddalonych czwórek diod świeci, zależnie od obrotu urządzenia, tak by zawsze wskazywać wyznaczone kierunki)
- Wskazywanie kierunku północy - jedna dioda świeci.
Wskazywanie kierunków N, E, W - trzy diody świecą.
- Wskazywanie kierunków N, S - dwie diody świecą.
- Wskazywanie kierunków E, W - dwie diody świecą.
- Do powyższych funkcji istnieje możliwość włączenia migacza, co pewien czas diody pulsują w kierunku północnym.
- Wskazywanie kąta pomiędzy północą a aktualnym obrotem od szczytu urządzenia.
- Wyznaczanie kąta w systemie od 0-360°, -180M80 lub 0-180°.
- Możliwość kalibracji urządzenia.
- Inne sposoby wyświetlania północy.
Jak to działa?
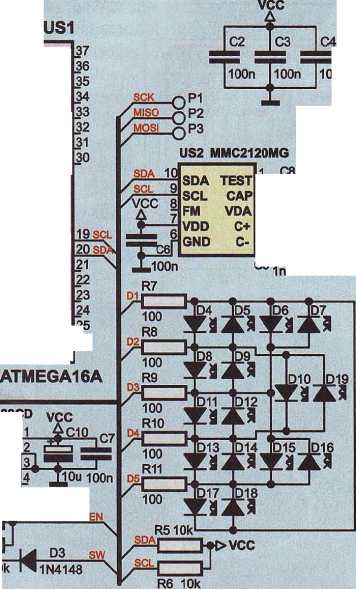
Schemat ideowy urządzenia przedstawiono na rysunku 1. Jednostką sterującą jest nowa i bardziej energooszczędna wersja popularnego ATmegaló, czyli ATmegalóA (US1). Co ważne, pracuje on w zakresie napięć 2,7V -5,5V, czyli tak jak ATmegalćL. Taktowanie z wewnętrznego zegara 4MHz. Zasilanie odbywa się za pomocą stabilizatora LDO LE33CD (US3) o niewielkim prądzie spoczynkowym, ok. 0,5mA i prądzie pracy do lOOmA. Wersja w obudowie SO-8 wyposażona jest w wejście (5 - INHIBIT), umożliwiające przełączanie stabilizatora między stanem włączenia i wyłączenia. Standarodwo wejście to podciągnięte jest rezystorem R2 do napięcia baterii, co powoduje wyłączenie stabilizatora. Niestety w stanie wyłączę-
XTAL2 XTAL1 PDO (RXD) PD1 (TXD) s *PD2 (.NTQ) ^^®PD3 (INT1) .PD4(OC1B) 'A PD5 (OC1A) A PD6 (ICP1) - PD7 (OG2)
stora Tl i rezystorów R3 i R4. Sam tranzystor, i początkowo przycisk, jest zasilany przez wspomniany R2.
Początkowe naciśnięcie przycisku powoduje włączenie stabilizatora. Uruchomiony mikrokontroler w pierwszych taktach ustawia stan wysoki na wyprowadzeniu EN (PD4) skonfigurowanym oczywiście jako wyjście, co otwiera tranzystor Tl. Taka konfiguracja umożliwia późniejsze wykorzystanie przycis-ku przez program mikrokontrolera. Mogłoby się wydawać, że sterowanie wejściem INH mogłoby się odbywać bez użycia tranzystora, nic bardziej mylnego, gdyż wyprowadzenia mikrokontrolera są wewnętrznie połączone z diodami zabezpieczającymi spolaryzowanymi wstecznie w normalnej pracy. Więc przyłożenie napięcia do
2 l| 10u ■
pr~rpvcc
qpx™"
US3
|
Vln |
V@u? |
|
GND |
GND |
|
GND |
GND |
|
INH |
NC |
|
R3 |
10k |
VCC
C <(ADC1) (ADC2) PA2 (ADC3) PA3 (ADC4) PA4 (ADC5) PA5 (ADC6) PA6 (ADC7) PA7
(SCL) PCO (SDA) PC1 (TCK) PC2 (TMS) PC3 (TDO) PC4 (TDI) PC5
o o a a (TOSC1) PC6 -OOQ§ (TOSC2) PC7
58 Listopad 2010 Elektronika dla Wszystkich
Wyszukiwarka
Podobne podstrony:
61 (23) a) Rys. 53. Odmiany zbiorników stabilizacyjnych typu hlume aj z pnepustmcą regulacyjną u kan
2.2. "L kład 4-opornikowy" Bardzo dobre właściwości co do stabilizacji p. pracy ma układ z
53 (288) 110 110 6.4. Strony żelbetowe Rys. 6.14. Strop deakcwy; 1 - bu ikr., 2 - podaufitka, 3 &nbs
64944 Strona00068 • 685Ł(D 2? (3 I 53. Próbnik diod Każda dioda ma dwie elektrody, katody i anodę. P
Strona00068 • 685Ł(D 2? (3 I 53. Próbnik diod Każda dioda ma dwie elektrody, katody i anodę. Prąd pr
img049 (13) 124 - R.7.101 i R.7.110. Rozwiązania Zad.7.101 ^ Zad.110 przedstawiono na rys.R.7.11 (pa
page0077 49 Mięczaki: Ślimaki Przodoskrzelne Grzebykoskrzelne. szer. 1,5—3 cm), ma skorupę spiralnie
IMG&88 a) Podaj nazwę procesu, korzenia. <*<i kamblum Rys. V.6 POBIERANIE, TRANSPORT, TRANSPIR
RETROKON WERSJA KATALOGÓW BIBLIOTECZNYCH 271 Należy określić, kto ma prawo do pobierania opłat za
jV. C crtTmŁ Wjufecy •ynMłt (ma*v^y, TRANSLACJA ] Rys. 7-19 Dojrzałe cząsteczki mRNA przeznaczone
skany023 4 * > przełączenia diody jak na rys.4.2a. Stały prąd przewodzenia diody w tym układzie j
skany037 4 przełączenia diody jak na rys.4.2a. Stały prąd przewodzenia diody w tym układzie jest rów
więcej podobnych podstron