CCF20111125�014 (3)
od momentu użytecznego n = f[Ms), czyli charakterystykę mechaniczną silnika szeregowego w następującej postaci:
n =

(27)
gdzie symbole ki i k2 oznaczają stale, uzyskane przy wyznaczaniu wzoru 9 -?.e-w?.orów—J-. W przybliżeniu natomiast:
n

(28)
Przebieg charakterystyki mechanicznej silnika szeregowego przy niezbocznikowanym uzwojeniu wzbudzenia pokazany jest na rys. 20 jako krzywą 1. Przy bardzo małych wartościach momentu hamującego, prędkość może wzrastać do bardzo dużych wartości, stwarza to niebezpieczeństwo uszkodzenia silnika ze względu na przekroczenie jego wytrzymałości mechanicznej, duże siły odśrodkowe mogą spowodować uszkodzenie uzwojeń. Silnik szeregowy nie może więc pracować w stanie jałowym i musi być połączony z maszyną roboczą za pomocą sprzęgła nierozłączalnego lub przekładni zębatej (nie wolno używać pasa klinowego).
433. Wyznaczenie charakterystyki mechanicznej
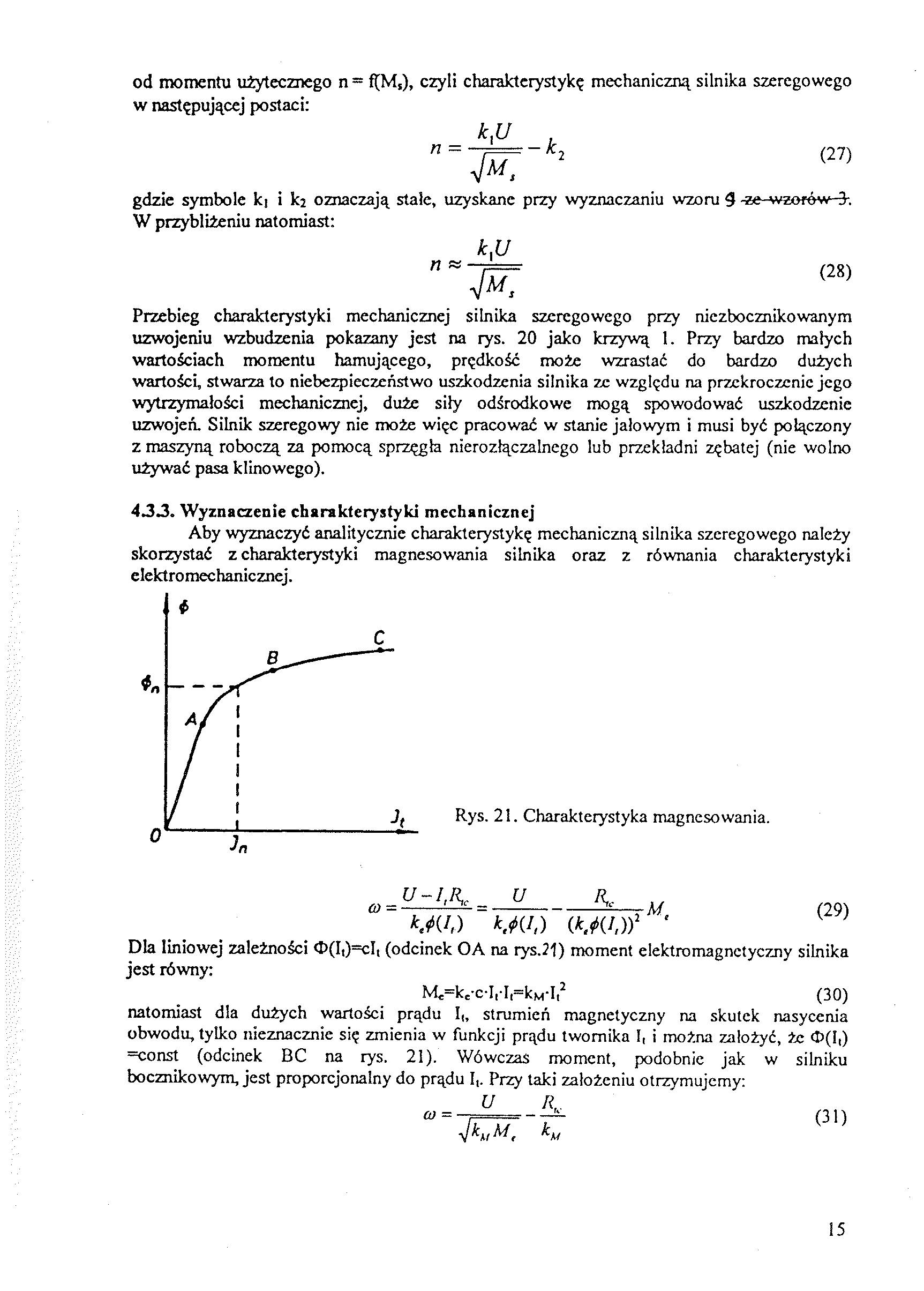
Aby wyznaczyć analitycznie charakterystykę mechaniczną silnika szeregowego należy skorzystać z charakterystyki magnesowania silnika oraz z równania charakterystyki elektromechanicznej.
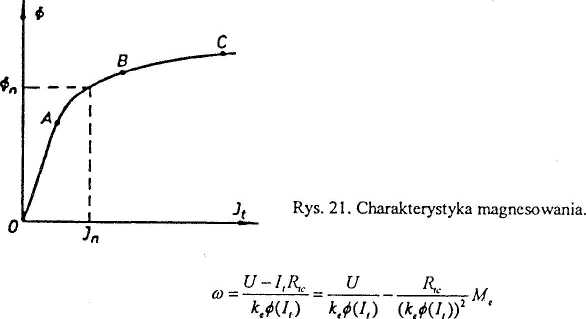
Dla liniowej zależności C>(It)—clt (odcinek OA na rys.21) moment elektromagnetyczny silnika jest równy:
Me=ke-c-I,-I,=kM-I,J (30)
natomiast dla dużych wartości prądu strumień magnetyczny na skutek nasycenia obwodu, tylko nieznacznie się zmienia w funkcji prądu twomika f, i można założyć, że 0(1,) =const (odcinek BC na rys. 21). Wówczas moment, podobnie jak w silniku bocznikowym, jest proporcjonalny do prądu I,. Przy taki założeniu otrzymujemy:
U R
Wyszukiwarka
Podobne podstrony:
CCF20111125�011 (4) Rys. 16. Charakterystyki mechaniczne silnika szeregowego z samowzbudzeniem.4.2.
CCF20111125�013 (3) 43.2. Charakterystyka mechaniczna Charakterystyka mechaniczna silnika szeregoweg
CCF20111125�016 (2) Sztuczne charakterystyki mechaniczne silnika szeregowego można wyznaczyć różnymi
Charakterystyki mechaniczne silnika szeregowego prqriu stałego i sposoby ich kształtowania Równania
Strona 16Temat: Charakterystyka mechaniczna silnika szeregowego prądu stałego Charakterystyką
CCF20111125�019 (2) Rys. 26. Charakterystyczna mechaniczna silnika bocznikowego (obcowzbudnego)
CCF20111125�020 Rys. 28. Charakterystyki mechaniczne silnika obcowzbudnego. Rezystancję podano
IMG207 207 Ry*. 17.2. Charakterystyka mechaniczna silnika bocznikowego Rys. 17.3. Charakterystyka me
Ą > <h > -Pi Rys. 12. Charakterystyki mechaniczne silnika bocznikowego prądu stałego przy r
Wzór opisujący charakterystykę mechaniczną silnika przedstawiany jest także w innych postaciach, jak
4. Charakterystyka mechaniczna silnika magnetoelektrycznego Charakterystykę wyznaczyliśmy poprzez
HWScan00689 7,Charakterystyka mechaniczna silnika obcowzbudnego prądu stałego jest opisana
Charakterystyki mechaniczne silnika obcowzbudnego prądu stałego i sposoby ich
Charakterystyki mechaniczne silników elektrycznych. Charakterystyką mechaniczną (ChM) silnika
Silnik Pr?du sta?ego strona 5 z 5 ZEiEO I Lab. 042SILNIK PRĄDU STAŁEGO str. 5/54. Wyznaczanie char
więcej podobnych podstron