CCF20120509�047
z. io ^/,ęst ii. nuzwią/.aiua i uupuwicu/.i
Położenie wektora naporu hydrodynamicznego R, czyli jego odległość od osi \, wyznaczamy z twierdzenia, iż moment siły wypadkowej względem dowolnego punku równy jest sumie momentów sił składowych, a więc
z. io ^/,ęst ii. nuzwią/.aiua i uupuwicu/.i
skąd
Re = Rxr — R2r,
r(R1-R2)
e =
R
(KI
Po uwzględnieniu równań (6) i (7) oraz przekształceniach
e =
[n2pD4'd2 — 8pQ2(D2—d2)~\(D2 — d2)r [n2 pD*d2 + 8 pQ2(D2 + d2)](D2 + d2)'
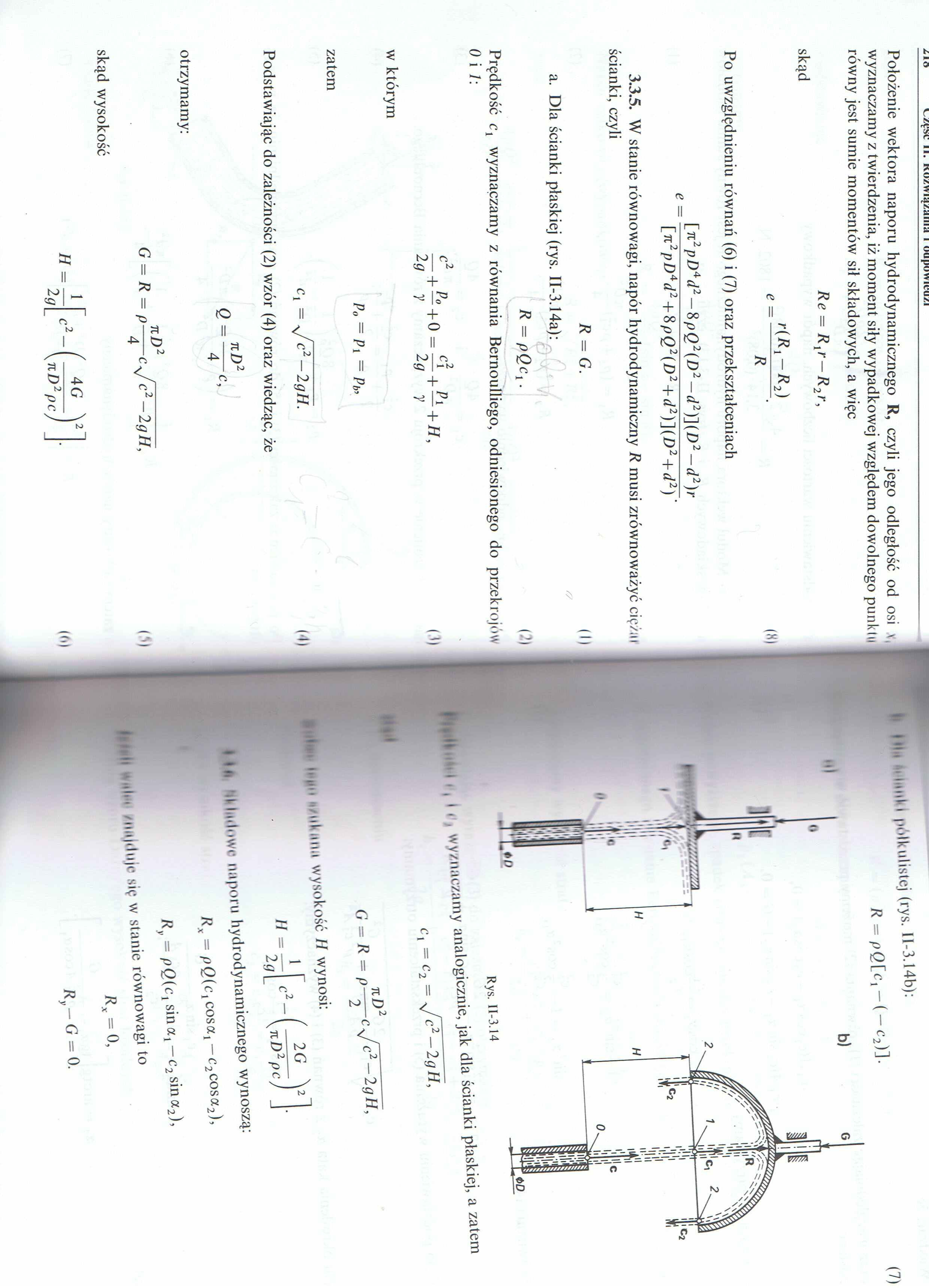
3.3.5. W stanie równowagi, napór hydrodynamiczny R musi zrównoważyć cię/ai ścianki, czyli
(II
(2)
R = G.
a. Dla ścianki płaskiej (rys. II-3.14a):
R = pQcv.
Prędkość cy wyznaczamy z równania Bernoulliego, odniesionego do przekrojów 0 i 1:
w którym
2 g y 2 g y
Po — Pl = Pb’
(')
zatem
(4)
c! = yJc2-2gH.
Podstawiając do zależności (2) wzór (4) oraz wiedząc, że
71D2
Q = —r-c,
otrzymamy:
nD2
G = R = p—c^c2-2gH,
skąd wysokość
H =
2 g
c2 —
4 G
nD pcJ
'"iil»l półkolistej (rys. 11-3.14b):
1
8
4
,
::
I) i
///
i
i
!|
i!
.00
R = pG[Ci-(-c2)].
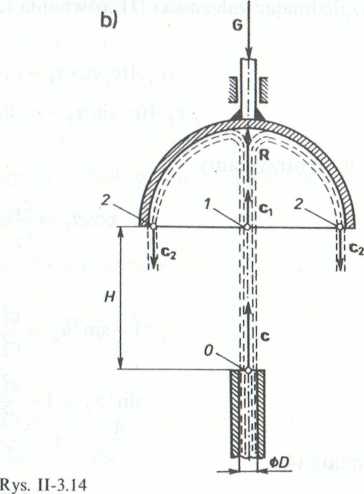
1 , I < , wyznaczamy analogicznie, jak dla ścianki płaskiej, a zatem c, = c2 = yj c1 2 — 2gH,
G = R = p-^-CyJ c2 — 2gH,
nD2
' i oil iin,i wysokość H wynosi:
H =
1
2(7
2 G
nD2 pc
III ,U,ulowi' naporu hydrodynamicznego wynoszą: Rx = pQ(clcosa.l — c2cosa2),
Ry = pQ(Ci sina! —c2 sina2),
, 11,, /iiii|iliijc siy w stanie równowagi to
Rr = 0,
Ry-G = 0.
Wyszukiwarka
Podobne podstrony:
CCF20120509�085 mmj cz-ęst ii. ■vu#.m<{/.aiiiłi i uupuwicu/J mmj &n
CCF20120509�109 ł?U c/ęst 11. nu/,m<{£iiiiia i uupuwicu^i j. isyiiamiKa cieczy rzeczywistych
CCF20120509�118 .M»0 ^/,ęsc ii. ivu/.vłii
SL372131 -5ho ii Cj f * o IO U v^* ki * II O,.
14598 Zdjęcie0613 (6) &B9 HM Instytut Doradztwa Majątkowego •►•MMMMNMfc.il im io U) n w jj ii ii
img177 i 1 L:„ , ,,./),/ i ,!• io „4. ii ĄA v.
Zdjęcie0613 (6) &B9 HM Instytut Doradztwa Majątkowego •►•MMMMNMfc.il im io U) n w jj ii ii t? mm
viewer Obliczenia transformatorów sieci5 Pte—-im so—- 1- 500 -40© 10- io - -300 ii-zoo § * i .5 a1
CCF20131013�005 &IO.LOHB PmfmMMfl -;du. j. 2 TttiftT - umkem ki/fisóij ajmł&a/. MIC~e (Yiatn
CCF20101218�007 io< fęJ<j£ jpnkJo. . . • r - / / / / n
CCF20110202�001 IO CjO> ’XML i.ćmc/l. oL& -t^dU’XźlCŁoÓjj pazkotoSi r
CCF20110211�001 IUUJJUJJJJJJJJ I J J J J J J J J J J J J J J li J ii i: ii ii ii ii U ii
CCF20110228�005 (2) IiY-nu o ii o era ni. ćwiczeń hiboraroryj.nveh t chemii fizycznej. Liczby arabsk
CCF20110303�000 (9) "P *■»«—Łt/ ftjrSoj *4? <- “ / 1 ii . 1 ■ A# x7
więcej podobnych podstron