CCF20130109�009
W statyce oprócz siły korzysta się z innej wielkości, jaką jest moment siły względem punktu. Momentem siły P względem punktu 0 nazywamy wektor M0 równy iloczynowi wektorowemu
M~0=OAxP, (1.1)
gdzie OA jest wektorem łączącym punkt A zaczepienia siły P z punktem 0, względem którego liczymy moment.
1.2. REDUKCJA DOWOLNEGO UKŁADU SIŁ
Każdy układ sił działający na dane ciało sztywne można zastąpić innym układem sił, równoważnym statycznie. Dwa układy sił nazywamy równoważnymi, jeżeli mają równe wektory główne i momenty główne względem dowolnego punktu.
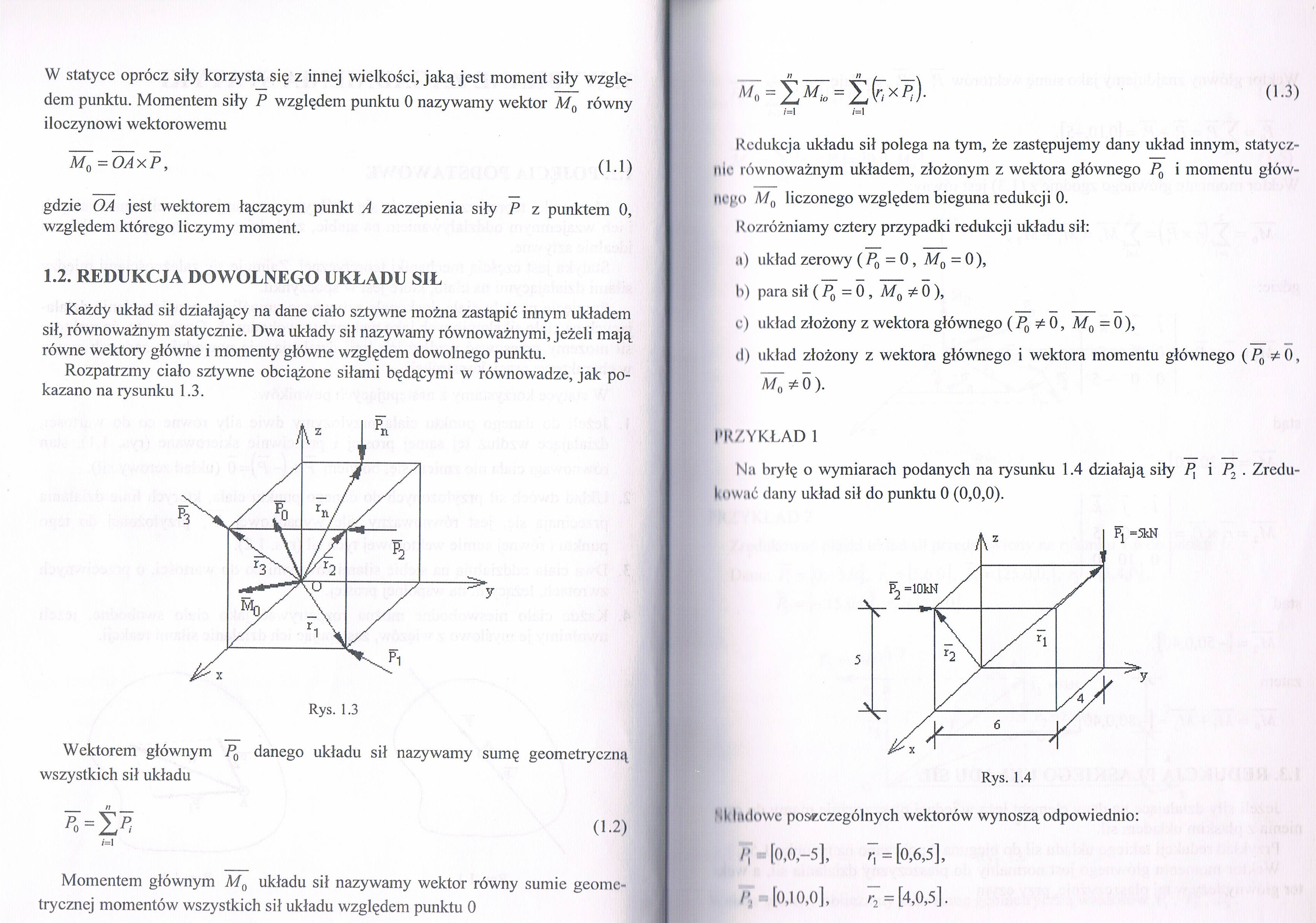
Rozpatrzmy ciało sztywne obciążone siłami będącymi w równowadze, jak pokazano na rysunku 1.3.
Wektorem głównym P0 danego układu sił nazywamy sumę geometryczną wszystkich sił układu
ń = (1.2)
;=i
Momentem głównym M0 układu sił nazywamy wektor równy sumie geometrycznej momentów wszystkich sił układu względem punktu 0
M0 =X^to =XKx/^)-
(1.3)
M /=1
Redukcja układu sił polega na tym, że zastępujemy dany układ innym, statycznie równoważnym układem, złożonym z wektora głównego P0 i momentu głównego Mn liczonego względem bieguna redukcji 0.
Rozróżniamy cztery przypadki redukcji układu sił: a) układ zerowy (P0 - 0 , M0 = 0), h) para sił (P0 = 0 , M0 ^ 0 ),
c) układ złożony z wektora głównego (P0 * 0, M0 = 0 ),
d) układ złożony z wektora głównego i wektora momentu głównego (P„ ź 0,
M0 *0).
1'RZYKŁAD 1
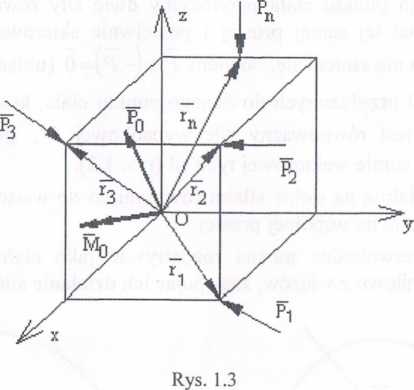
Na bryłę o wymiarach podanych na rysunku 1.4 działają siły /} i P2 . Zredukować dany układ sił do punktu 0 (0,0,0).
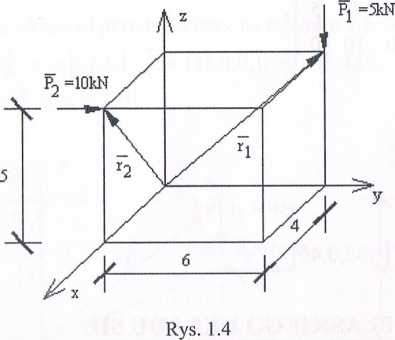
M Indowe poszczególnych wektorów wynoszą odpowiednio: /; [0,0,-5], ^ = [0,6,5],
/'. [0,10,0], V2 = [4,0,5].
Wyszukiwarka
Podobne podstrony:
CCF20110902�007 próbki do roztworu -stosuje sie mineralizacje czego efektem jest rozkład próbki i ut
JUŻ WIEM POTRAFIĘ W PRZEDSZKOLU (07) Opowiedz, jak się bawią dzieci. Jaka jest Twoja ulubiona zabaw
JUŻ WIEM POTRAFIĘ W PRZEDSZKOLU (07) * Opowiedz, jak się bawią dzieci. Jaka jest Twoja ulubiona zab
ELEMENTARZ 3 LATKA Dziewczynka wybrała się na spacer. Jaka jest pogoda na rysunku? Sprawdź, co nie
Szkoła rodzenia ma pomóc rodzicom w odnalezieniu się w nowej sytuacji jaką jest macierzyństwo i
...... • 5 Dziewczynka wybrała się na spacer. Jaka jest pogoda na rysunku? Sprawdź, co nie pasuje w
CCF20111125�010 (4) u, M = cl.=>M = - (20) Ra + Rj Tryb hamowania przeciwprądem stosowany jest r
16 7 Śnieg się roztopił i w szklance pojawiła się woda. Widzisz, jaka jest brudna? Czy wypiłbyś taką
1045107U3606564695730!18840864 n 24. Po co stosuje się podoblcnic? 2 25. Jaka jest różnica pomiędz
elementy (lub przynajmniej część z nich) składają się na nią, jaka jest ich wartość lub jakie jest
DSCF4651 Jeśli jednak sprzedawca zapyta najpierw, czym interesuje się żona klienta, jaką jest osobą
CCF20140413�005 Zadania z fizykiZad 1 (RH par 49-8 zad 35) Jaka jest a) energia, b) pęd i c) długość
więcej podobnych podstron