DSCF9306
6
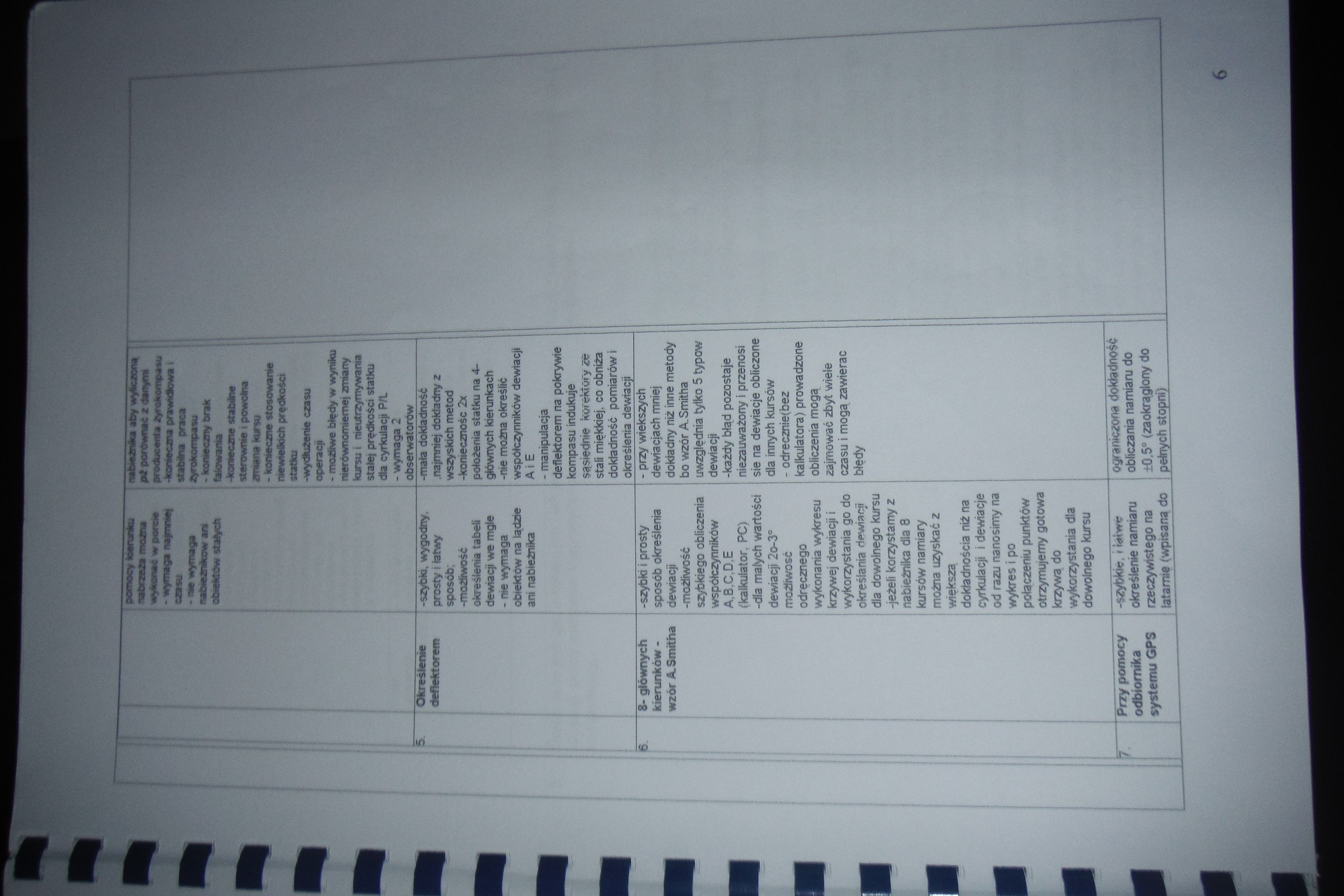
defiełttoreiw
8- głównych kierunków -wzór A. Smitha
Przy pomocy odbiornika systemu GPS
pomocy ioenjntai
WyWMgl MfMM|
- nie wymaga (■bnaiowan odaMOw stałych
-szybki, wygodny, prosty i łatwy sposób: -możfiwość określenia tabeli dewiacji we mgle - nie wymaga obiektów na lądzie ani nabieżnika
-szybki i prosty sposób określenia dewiacji -możliwość szybkiego obliczenia współczynników A,B,C,D,E (kalkulator, PC)
-dla małych wartości dewiacji 2o-3° możliwość odręcznego wykonania wykresu krzywej dewiacji i wykorzystania go do określania dewiacji dla dowolnego kursu -jeżeli korzystamy z nabieżnika dla 8 kursów namiary można uzyskać z większą
dokładnością niż na cyrkulacji i dewiacje od razu nanosimy na wykres i po połączeniu punktów otrzymujemy gotowa krzywą do wykorzystania dla dowolnego kursu
-szybkie, i Uw określenie namiaru rzeczywistego na latarnię (wpisaną do
mUmrnśm aby wyicaoną p£ parh—t a dmymi
producenta Zyrohcmpcsu -Konieczna pmwaowa i atabłia praca lyrohompnu
- konieczny brak fałowanu
-konieczne stabilne sterownie i powolna jwsawa kurw
- konieczne stosowanie reewteBoch prędkości statku
-wytSużenie czasu operami
- możliwe błędy w wyniku nierównomiernej zmiany kursu i nieutreymywaraa stałej prędkości statku dla cyrkulacji P/L -wymaga 2 obserwatorów
-mała dokładność .najmniej dokładny z wszyskich metod -konieczność 2x położenia statku na 4-głównych kierunkach -nie można określić współczynników dewiacji Ai E
- manipulacja deflektorem na pokrywie kompasu indukuje sąsiednie korektory ze stali miękkiej, co obniża dokładność pomiarowi określenia dewiacji_
- przy większych dewiacjach mniej dokładny niż inne metody bo wzór A. Smitha uwzględnia tytko 5 typów dewiacji
-każdy błąd pozostaje niezauważony i przenosi sie na dewiacje obliczone dla innych kursów
- odrecznie(bez kalkulatora) prowadzone obliczenia mogą zajmować zbyt wiele czasu i mogą zawierać błędy
ograniczona dokładność obliczania namiaru do ±0.5° (zaokrąglony do pełnych stopni)_
Wyszukiwarka
Podobne podstrony:
DSCF9339 Określenie
DSCF9360 TT— - wyrywkowo przy pomocy kierunku nabrzeża można wykon
cv 2 (2) Wzór pochodzi ze strony http: : . :xx. został utworzony przy pomocy kreat
UE: nacisk na prawa człowieka, przy pomocy gospodarczej. Główny aktor w ramach UE - Francja. Zaangaż
Obraz076 Wydobywając tę potencjalną wizję przyszłości przy pomocy pytania o cud można podążać w kier
ScannedImage 3 (13) 2012-11-18 CZ< W 1C Z G FI 11F C iŁy FI FF G - wykonywane są przez pacjenta
ZBIGNIEW BLOCKI Liczbę Log2 := log z + iArgz nazywamy logarytmem głównym z. Przy pomocy logarytmu mo
POZIOM NISKI - Przy pomocy nauczyciela: określa wzajemne położenie przedmiotów w przestrzeni oraz ki
skanuj0050 (17) Okazy typu E najłatwiej jest wykonać przy pomocy gwon dziownicy. Można przyjąć, że
File1052 ® Opuszkami palców nakreśl linie. ^ Ponownie rysuj linie po śladzie przy pomocy kredki świe
File1052 (3) ©Opuszkami palców nakreśl linie. -©Ponownie rysuj linie po śladzie przy pomocy kredki
więcej podobnych podstron