DSCF9339

Określenie | detektorem
1
S-głównych kierunków-wzór A.Smitha
Przy pomocy odbiornika systemu GPS
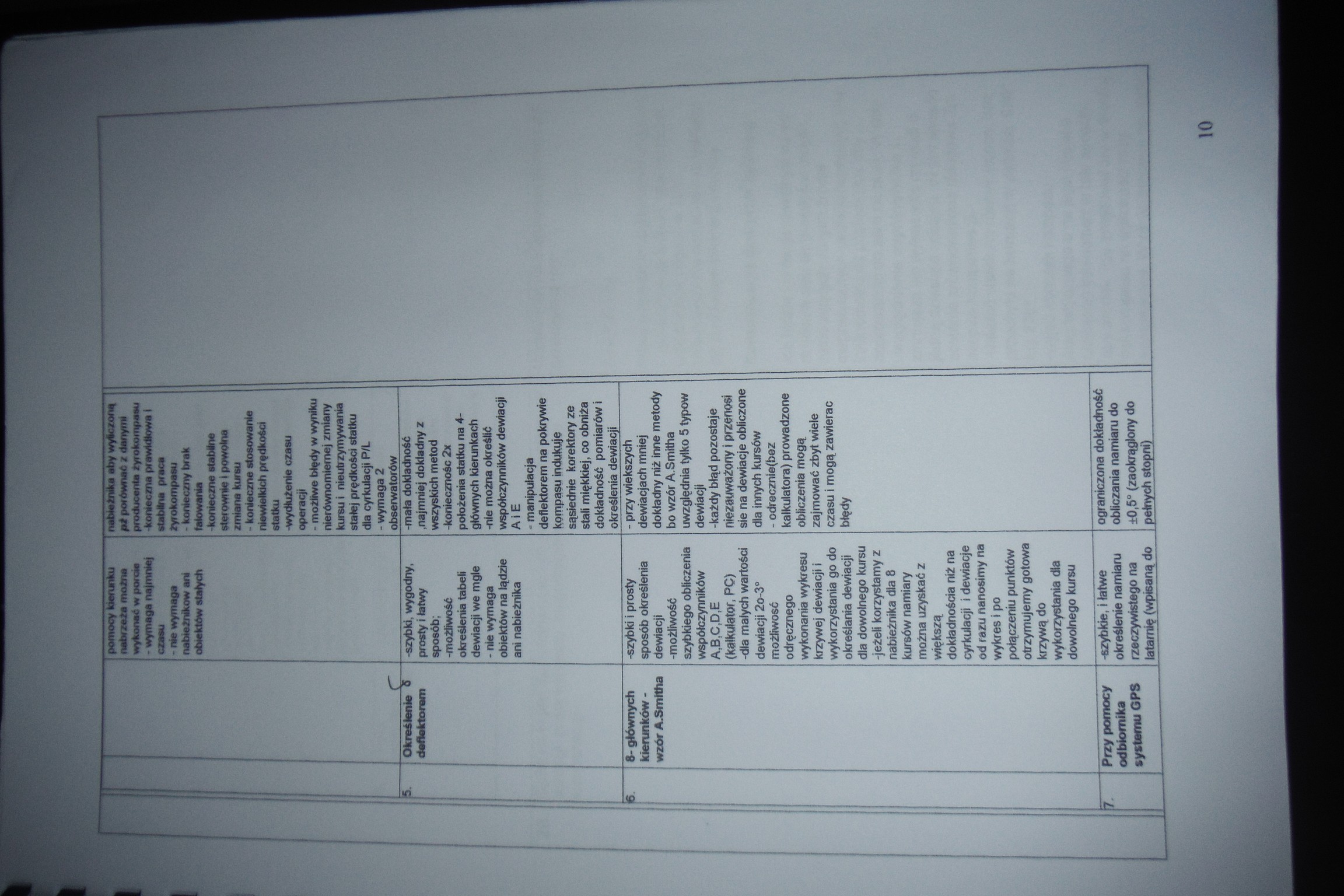
pomocy kierunku nabrzeża można wykonać w porcie - wymaga najmniej
nabielnike aby wyiczoną pi porównać z danymi producenta łyrekompeeu
-konieczna prawidłowa I stabkna prace lyrokompeeu
- konieczny brak falowania -konieczne stabilne sterownie i powolna zmiana kursu
- konieczne stosowanie niewielkich prędkości statku
-wydłużenie czasu operacji
- możliwe błędy w wyniku nierównomiernej zmiany kursu i nieutrzymywania stałej prędkości statku dla cyrkulacji P/L -wymaga 2 obserwatorów
-szybki, wygodny, prosty i łatwy sposób; -możliwość określenia tabeli dewiacji we mgle - nie wymaga obiektów na lądzie ani nabjeżnika
-szybki i prosty sposób określenia dewiacji -możliwość szybkiego obliczenia współczynników A,B,C,D,E (kalkulator, PC)
-dla małych wartości dewiacji 2o-3° możliwość odręcznego wykonania wykresu krzywej dewiacji i wykorzystania go do określania dewiacji dla dowolnego kursu -jeżeli korzystamy z nabieźnika dla 8 kursów namiary można uzyskać z większą
dokładnością niż na cyrkulacji i dewiacje od razu nanosimy na wykres i po połączeniu punktów otrzymujemy gotowa krzywą do wykorzystania dla dowolnego kursu
-szybkie, i łatwe określenie namiaru rzeczywistego na latarnię (wpisaną do
-mała dokładność .najmniej dokładny z wszyskich metod -konieczność 2x położenia statku na 4-głównych kierunkach -nie można określić współczynników dewiacji AiE
• manipulacja de Hektorem na pokrywie kompasu indukuje sąsiednie korektory ze stali miękkiej, co obniża dokładność pomiarów i określenia dewiacji
- przy większych dewiacjach mniej dokładny niż inne metody bo wzór A.Smitha uwzględnia tylko 5 typów dewiacji
-każdy błąd pozostaje niezauważony i przenosi sie na dewiacje obliczone dla innych kursów
- odrecznie(bez kalkulatora) prowadzone obliczenia mogą zajmować zbyt wiele czasu i mogą zawierać błędy
ograniczona dokładność obliczania namiaru do ±0,5° (zaokrąglony do pełnych stopni)_
Wyszukiwarka
Podobne podstrony:
DSCF9306 6 defiełttoreiw 8- głównych kierunków -wzór A. Smitha Przy pomocy odbiornika systemu
CCF20101206�020 Przykład: Określić wielkość rozstawy drenów o średnicy <j> 5 cm przy pomocy ró
Dla matryc o kącie y = 45° i przy warunkach tarcia określonych kątem tarcia p, = 6° wzór (4.29) przy
nych (np. zmierzenie temperatury powietrza, opisanie wyglądu pagórka, określenie kierunku biegu rzek
Faliński J.B. 1972. Synantropizacja szaty roślinnej. Próba określenia istoty procesu i głównych kier
POZIOM NISKI - Przy pomocy nauczyciela: określa wzajemne położenie przedmiotów w przestrzeni oraz ki
DSCF9360 TT— - wyrywkowo przy pomocy kierunku nabrzeża można wykon
Zdjęcie0862 Kolby miarowe -siużą do odmierzania -ioiie określonych iloso oerzyPipety - posługujemy d
Wydajność pompy określa się bezpośrednio przy pomocy przepływomierzy lub pośrednio przy pomocy zwęże
• Cykl produkcyjny można określić analitycznie, stosując odpowiedni wzór, lub
19 TWORZENIE STRATEGII ZAKUPOWEJ Macierz Kraljica Głównym kierunkiem negocjacji powinna być optymaln
Przy posługiwaniu się systemem HACCP w żywieniu zbiorowym stosowane są następujące określenia i
IMGW70 AD=C+I AD = Ca + ksk*Y+la - określa łączne zamierzone wydatki na towary prz
więcej podobnych podstron