HPIM0883

9. Sztuczna mlełigencja w robotyce
Procedura wnioskowania znajduje wygrywającą regułę, używając metody min/max. Dla każdej reguły, spośród ujętych w niej funkcji przynależności, zostaje wyznaczona ta, dla której stopień przynależności ma najmniejszą wartość. Następnie z otrzymanych w ten sposób wartości zostaje znaleziona maksymalna. Dla pokazanego przykładu regułą wygrywającą jest reguła 2, dla której minimalna wartość stopnia przynależności jest równa 0,70 i jest największa dla wszystkich reguł (patrz obliczenie z prawej strony reguł). Reguła 1, z której pochodzi znaleziony w ten sposób stopień przynależności, jest regułą wygrywającą i odpowiadająca jej wartość przyrostu prędkości równa 110 jest podana na wyjście regulatora prędkości.
Pokazany proces wnioskowania w sterowaniu rozmytym charakteryzuje się równoległym przetwarzaniem danych (ma strukturę przetwarzania równoległego), które jest typowe dla sposobu myślenia człowieka. W odniesieniu do układów mechanicznych ma to wiele zalet, pokazanych poniżej.
Konwencjonalne systemy sterowania wymagają ścisłych.algorytmów przetwarzania danych. Wymaga to dużej liczby informacji. Jednakże niektóre rodzaje sterowań są albo bardzo trudne, albo wręcz niemożliwe do glgoiytmizacji. Sterowanie „Fuzzy” umożliwia pokonanie tych problemów. W większości przypadków „Fuzzy" wymaga 1/10, a czasami nawet mniej, informacji wymaganych przy sterowaniu konwencjonalnym. Zmniejsza to bardzo znacznie czas projektowania podsystemu sterowania zautomatyzowanych maszyn, układów mechanicznych, czy też systemów produkcyjnych.
Proces sterowania rozmytego nie wymaga wykonywania obliczeń, stąd też jego szybkość realizacji jest większa niż sterowania dyskretnego. Szybkość przetwarzania zwiększa się również dlatego, że każdy proces podstawowy przebiega oddzielnie i wszystkie te procesy mogą przebiegać równolegle i jednocześnie. Dodatkową zaletą jest to, że wszystkie procesy podstawowe mogą być osobno sprawdzane. Na przykład, pojedyncza część procesu podstawowego, która wywiera tylko niewielki wpływ na ostateczny wynik, może być testowana w taki sposób, żc tylko jej poprawny wynik wpłynie na wartość sumy logicznej. Pewność działania jest zwiększona również dlatego, iż zdeterminowane systemy sterowania przetwarzają równania szeregowo i jeżeli choć w jednym z nich wystąpi błąd, to końcowy wynik będzie błędny. Ponieważ w sterowaniu rozmytym każdy z procesów podstawowych odbywa się oddzielnie, to wpływ pojedynczego procesu na końcowy wynik jest minimalny. W rezultacie system sterowania jako całość jest bardzo odporny na błędy i zakłócenia.
i Zastosowania robotów ! przemysłowych

10.1. Budowa zrobotyzowanych systemów wytwarzania
10.1.1. Wprowadzenie do projektowania zrobotyzowanych systemów wytwarzania
|ntensywny rozwój automatyzacji produkcji we współczesnym przemyśle jest ściśle powiązany z robotyzacją systemów wytwarzania. Zrobotyzowany system wytwarzania z funkcjonalnego punktu widzenia można przedstawić jako zbiór fedsystemów składowych o strukturze pokazanej na rys. 10.1.
. Podsystem technologiczny to podstawowe urządzenia technologiczne^ celowość zastosowania których określa klasa przedmiotów przewidzianych dq. wykonywania i założony proces technologiczny. Podsystem wytwarzania • stanowią więc maszyny i urządzenia będące wyposażeniem stanowisk roboczych
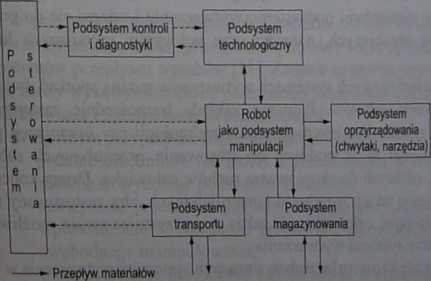
► Przepływ informacji
10.1 _____•
iruktura funkcjonalna elastycznych systemów wytwarzania [31]
■
Wyszukiwarka
Podobne podstrony:
HPIM0879 9. Sztuczna Inteligencja w robotyce Kamera TV która zapisała ten obraz znajdowała się w sta
WSSE w Warszawie, Dział Laboratoryjny Wydanie 2 z dnia 2014-01-02 Wykaz procedur badawczych znajduje
P1080334 10. Sztuczna inteligencja w robotyce Zmodyfikowana waga 00.2) W procesie samouczenia, opisa
HPIM0877 9. isuciru fotetigencja w robotyce wowych organizmów żywych. Topologia połączeń neuronów or
74879 P1080341 10. Sztuczna inteligencja w robotyce 10. Sztuczna inteligencja w robotyce Nowe wagi k
SE20101110�009 ty} i najlepszego pc^jakim^względi^Najczęstszymi ograniczeniami efektywno ści procedu
Algorytmy Sztucznej Inteligencji wykład nr 2 wnioskowanie i SE Agnieszka Nowak - Brzezińska
więcej podobnych podstron