7506567234
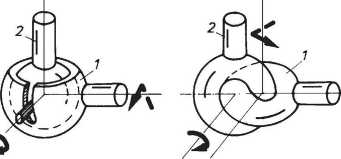
Rys. 10. Przykłady par kinematycznych II klasy: a) przecinające się osie obrotów, b) zwichrowane osie obrotów
9a), bądź prostopadłe (rys. 9b). W parach przedstawionych na rys. lOa i lOb człon (2) może wykonywać 2 obroty, przy czym w przypadku a) osie tych obrotów przecinają się pod kątem prostym, w przypadku b) zaś są do siebie również prostopadłe, lecz wzajemnie zwichrowane. Nie zawsze też stopnie swobody odnoszą się do prostych ruchów postępowych lub obrotowych. W pewnych rozwiązaniach jeden prosty ruch względny dwóch rozpatrywanych członów wywołuje ściśle określony jeden lub kilka innych ruchów prostych. Znanym przykładem takiego zjawiska jest para śrubowa przedstawiona na rys. 1 la. Ruchowi obrotowemu członu (2) względem członu (1) towzrzy-szy ściśle określony ruch postępowy. Te ruchy Tx i Rx, dla odróżnienia od odpowiednich ruchów niezależnych, będziemy sygnalizować przez zapis ich symboli w jednym nawiasie okrągłym (TxRx). Kolejny przykład tego typu funkcyjnych powiązań ruchów dwóch członów pary przedstawiono na rys. 1 lb. Ruch postępowy Tx członu (2) względem członu (1) wywołuje jednocześnie przesunięcie wzdłuż osi y, a więc T.
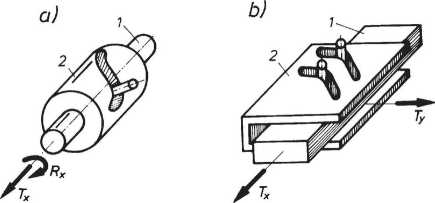
Rys. 11. Przykłady par kinematycznych I klasy o funkcyjnym powiązaniu ruchów elementarnych:
*)T,=ARJ,V)Tx=ATy)
Wyszukiwarka
Podobne podstrony:
12 Rys. 8. Przykłady par kinematycznych I-s-V klasy
i. Analiza strukturalna Podział par kinematycznych na klasy f- liczba względnych stopni swobody czło
IMG 41 (2) Rys. 5.10. Przykład modelu sieciowego opracowanego w programie MS Project 2003. przedstaw
CCF20121215�39 55 O 00000001010 11010100100011001100110010000000000000000000000 Rys. 2.10. Przykład
CCF20120324�020 189 Rys. 10.9. Przykład planu sieciowego wewnętrznej instalacji kanalizacyjnej 11. P
CCF20120324�021 00 <r> Rys. 10.7. Przykład struktury planu aieoiowego
004 (4) Układy regulacji i sterowania kl.4T 4 Rys. 10.5. Przykłady podstawowych odmian zaworów rozdz
10002 2 Rys. 10.5.1. Przykładowa struktura organizacyjna przedsiębiorstwa o trzech poziomach zarządz
Rys. 10. Przykładowy schemat obiektowej struktury danych
Rys. 13. Przykłady łańcuchów kinematycznych2.3.2. Formy zapisu łańcuchów kinematycznych W
więcej podobnych podstron