109778
rzędu odn=4don=l
Logarytmiczne charakterystyki częstotliwościowe: zwane charakterystykami Bodiego Logarytmiczne charakterystyki amplitudowe Lm(w) jest określany zależnością: lm(w)=20logioA(w)=20logi0|G(jw)| i jest podawana w decybelach logarytmiczna charakterystyka fazowa <p(w) jest zależnością przesunięcia fazowego od częstotliwości przedstawionej w skali logarytmicznej.
Zalety charakterystyk logarytmicznych : LS wzmocnienia umożliwia wyznaczanie charakterystyki wypadkowej układów połączonych szeregowo przez dodawanie charakterystyk układów składowych.
Schemat blokowy układu automatycznej regulacji
Układu autom. Regulacji są układami zamkniętymi wykorzystującymi ujemne sprzężenie zwrotne Zadanie układu regulacji- minimalizacja sygnału uchybu regulacji e(t) tak aby lim e(t)=lim(w(t)-y(t))->0
Obiekt regulacji: Jako proces fizyczny o określonej dynamice np. proces zmiany temperatury w piecu Jako zestaw aparatury technologicznej, w której zachodzi proces regulowany, mp. Piec hartowniczy
Proces identyfikacji obiektu umożliwia stworzenie modelu matematycznego obiekty regulacji, na podstawie obserwacji przebiegów wyjściowych (będącychnp. Odpowiedzią na wymuszenie skokowe)
Obiekty regulacji podobnie jak inne elementy automatyki, klasyfikuje się ze względu na ich własności dynamiczne.
Ze względu na końcową wartość odpowiedzi skokowej rozróżnia się dwie grypy obiektów:
1) statyczne (z samowyrównaniem), których wartość odpowiedzi skokowej dąży do wartości skończonej) nie posiadają działania całkującego)
2) astatyczne (bez samowyrównania), których wartość odpowiedzi skokowej dąży do nieskończoności (posiadają działanie całkujące)
Charakterystyki skokowe obiektów statycznych: 1) inercyjny pierwszego rzędu. Gl(s) = 2) inercyjny wyższego rzędu: Gl(s) 3) inercyjny wyższego rzędu z opóżnieniem:Gl(s) = (nsłl)(r2^ 1)(r3stl)g 705
charak
|
rzeczywista | |
|
/ |
charakterystyka |
|
/ |
aproksymowana t |
|
V, T |
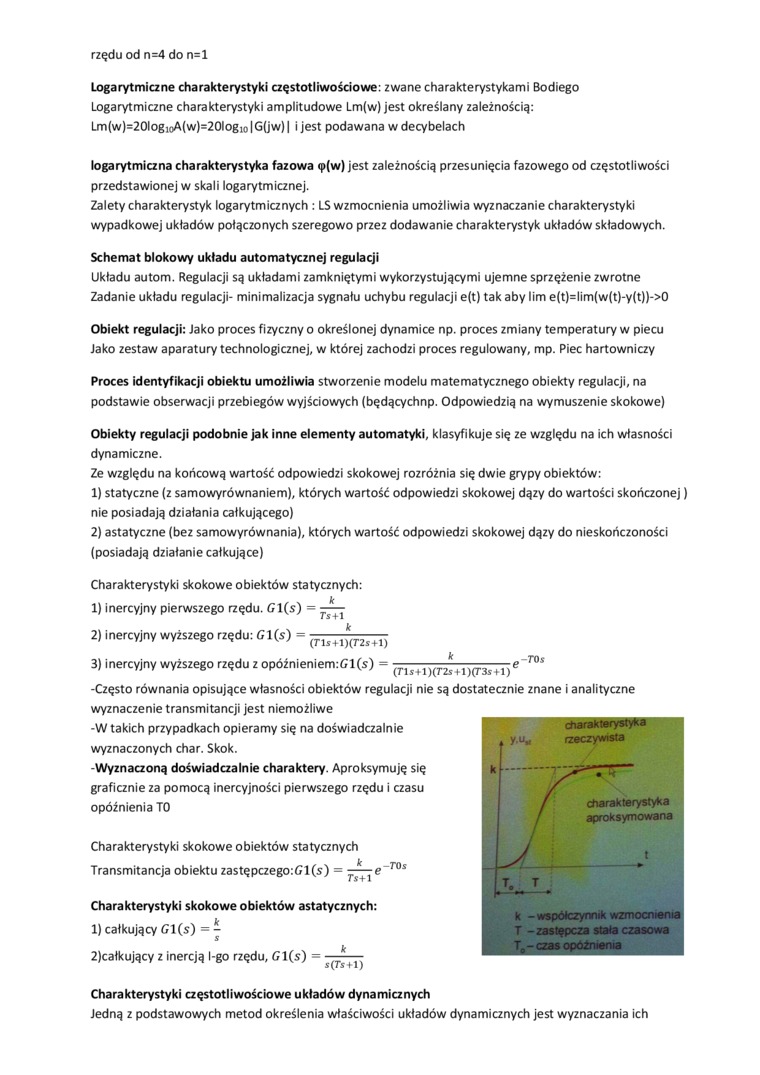
-Często równania opisujące własności obiektów regulacji nie są dostatecznie znane i analityczne wyznaczenie transmitancji jest niemożliwe -W takich przypadkach opieramy się na doświadczalnie wyznaczonych char. Skok.
-Wyznaczoną doświadczalnie charaktery. Aproksymuję się graficznie za pomocą inercyjności pierwszego rzędu i czasu opóźnienia TO
Charakterystyki skokowe obiektów statycznych Transmitancja obiektu zastępczego:Gl(s) =
k - współczynnik wzmocnieni T -zastępcza stała czasowa T0- czas opóźnienia
Charakterystyki skokowe obiektów astatycznych:
1) całkujący <71(s) = -
S
2) całkujący z inercją I-go rzędu, Gl(s) - ^ ^ ] (
Charakterystyki częstotliwościowe układów dynamicznych
Jedną z podstawowych metod określenia właściwości układów dynamicznych jest wyznaczania ich
Wyszukiwarka
Podobne podstrony:
042 bmp Przebieg logarytmicznej charakterystyki amplitudowo-częstotliwościowej przetwornika pierwsze
046 bmp Rys, 6.13. Logarytmiczne charakterystyki fazowo-częstotliwościowe przetworników drugiego rzę
i !■ Rys. 6.13. Logarytmiczne charakterystyki fazowo-częstotliwościowe przetworników drugiego rzędu
Logarytmiczne charakterystyki częstotliwościowe (Bodego) Logarytmiczna charakterystyka fazowafj§ i
Slajd5 Filtr dolnoprzepustowy (cd) Logarytmiczne charakterystyki częstotliwościowe: amplitudowa i
Slajd9 Filtr górnoprzepustowy Logarytmiczne charakterystyki częstotliwościowe; amplitudowa i fazowa
Logarytmiczne charakterystyki częstotliwościowe (Bodego) ^(®) 1(ćd) = 20 log M( a)
*Ucc Wzmacniacz tranzystorowy ♦20U Logarytmiczna charakterystyka częstotliwościowa •
obowiązujących przepisów należy do prokuratora niższego rzędu: zasada ta ma charakter bezwzględny,
1tom212 8. AUTOMATYKA I ROBOTYKA-426 Logarytmiczna charakterystyka fazy takiego układu otwartego jes
560792Q9990971407929D7224436 n Zakładając, źc V0 jest idealny obliczyć
Scan10030 (6) 4) Jakie jest nachylenie logarytmicznej charakterystyki amplitudowej przy pulsacji co—
więcej podobnych podstron