Akademia Techniczno-Humanistyczna
Bielsko-Biała
Kierunek: Elektrotechnika
Rok: III
Semestr: VI
Sprawozdanie z Laboratorium Podstaw Automatyki
Temat: Regulacja dwupołożeniowa
Data wykonania ćwiczenia: 06-03-2003
Data oddania sprawozdania: 13-03-2003
Grupa: Sprawozdanie wykonali:
Adam Szafron Adam Szafron
Dariusz Haręża Paweł Knapek
Dariusz Marszałek
Grzegorz Knyps
Jarosław Śledź
Krzysztof Stopczak
Michał Matusiak
Paweł Knapek
Cel ćwiczenia:
Poznanie idei regulacji dwupołożeniowej oraz zasady działania regulatora dwupołożeniowego RE3AH pracującego w układzie nagrzewania ścianek odpowiedniej rurki.
Podstawowym celem ćwiczenia było zaobserwowanie zmian pracy badanego układu, zarejestrowanych w czasie, na skutek różnych nastaw regulatora dwupołożeniowego.
Schemat stanowiska pomiarowego:
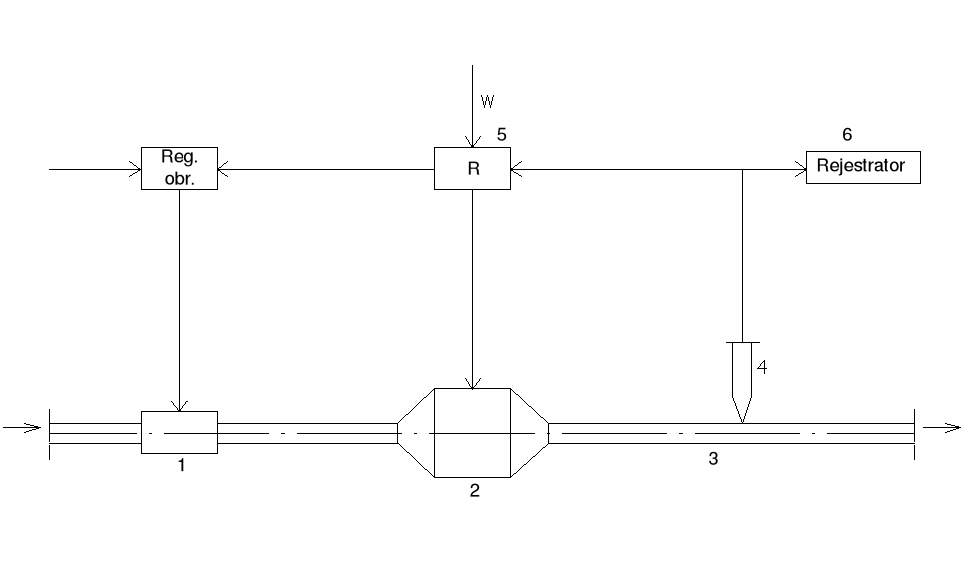
1 - silnik wraz z dmuchawą nawiewającą powietrze do rurociągu
2 - komora z grzejnikiem
3 - rurociąg
4 - czujnik termoelektryczny
5 - regulator
6 - rejestrator
Opis działania badanego układu:
Obiekt w układzie regulacji temperatury powietrza dostarczanego rurociągiem (3) stanowi komora z grzejnikiem (2), który służy do podgrzewania powietrza. Chłodzenie grzejnika i komory zapewnia dmuchawa (1) umieszczona na wlocie do rurociągu. Czujnik termoelektryczny (4) tj. termopara żelazo - konstantan mierzy temperaturę ścianki rurociągu, która wobec małej pojemności cieplnej rury i dużego natężenia przepływu powietrza jest równa temperaturze wewnątrz rurociągu. W układzie tym zastosowany został regulator dwustawny RE3AH.
Przebieg ćwiczenia:
Zadaniem naszym w tym ćwiczeniu było zdjęcie charakterystyki skokowej temperatury w zależności od różnych nastaw regulatora ![]()
oraz ![]()
. Ponadto koniecznym było zmierzenie czasów załączania regulatora (czas grzania) i czasu wyłączenia regulatora (czas stygnięcia).
Wyniki pomiarów:
Wartość zadana |
||||||||||
|
|
|||||||||
|
0 |
4 |
6 |
8 |
10 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
7,6 |
19 |
10,3 |
28 |
12,4 |
33,6 |
16,7 |
45,2 |
27,4 |
71,4 |
|
7,7 |
17 |
10,8 |
27,6 |
12,4 |
33,2 |
16,8 |
45,1 |
26,8 |
74,6 |
|
7,7 |
22 |
10,4 |
27,7 |
12,2 |
33,1 |
16,8 |
44,6 |
27,5 |
73 |
2 |
2,7 |
6 |
3,8 |
8,4 |
4,9 |
11 |
6,3 |
14,4 |
9,6 |
21 |
|
2,8 |
5 |
3,7 |
8,3 |
4,8 |
10,7 |
6,4 |
14,4 |
9,7 |
20 |
|
2,8 |
5,5 |
3,8 |
9 |
4,9 |
10,7 |
6,6 |
14,3 |
9,5 |
21 |
4 |
1,4 |
2,4 |
2 |
3,3 |
2,4 |
4,1 |
3,2 |
5,7 |
5,9 |
10,1 |
|
1,4 |
2 |
2 |
3,4 |
2,5 |
4 |
3,3 |
5,5 |
5,8 |
10 |
|
1,5 |
2 |
1,7 |
3,4 |
2,4 |
4,1 |
3,3 |
5,5 |
5,5 |
10,1 |
gdzie:
![]()
- czas grzania
![]()
- czas stygnięcia
Wyznaczenie średnich temperatur

oraz średniego błędu regulacji
przy odpowiednich nastawach regulatora:

,
:

⇒ ![]()
![]()
![]()

,
:

⇒ ![]()
![]()
![]()

,
:

⇒ ![]()
![]()
![]()

,
:
⇒ ![]()
![]()
![]()

,
:

⇒ ![]()
![]()
![]()

,
:

⇒ ![]()
![]()
![]()

,
:

⇒ ![]()
![]()
![]()

,
:

⇒ ![]()
![]()
![]()

,
:
⇒ ![]()
![]()
![]()

,
:

⇒ ![]()
![]()
![]()

,
:

⇒ ![]()
![]()
![]()

,
:

⇒ ![]()
![]()
![]()

,
:

⇒ ![]()
![]()
![]()

,
:

⇒ ![]()
![]()
![]()

,
:
⇒ ![]()
![]()
![]()
gdzie: ![]()
- zakres proporcjonalności
![]()
- szerokość strefy histerezy
![]()
- średni błąd regulacji ![]()
![]()
- średnie wartości temperatur przebiegów
Tabela zestawiająca średnie czasy grzania i stygnięcia:
Wartość zadana |
||||||||||
|
|
|||||||||
|
0 |
4 |
6 |
8 |
10 |
|||||
|
tgśr |
tsśr |
tgśr |
tsśr |
tgśr |
tsśr |
tgśr |
tsśr |
tgśr |
tsśr |
|
|
|
|
|
|
|
|
|
|
|
0 |
7,68 |
19,3 |
10,48 |
27,7 |
12,3 |
33,3 |
16,76 |
44,9 |
27,2 |
73 |
2 |
2,76 |
5,5 |
3,78 |
8,5 |
3,39 |
10,8 |
6,4 |
14,3 |
9,59 |
20 |
4 |
1,42 |
2,1 |
1,91 |
3,36 |
2,4 |
4,0 |
3,2 |
5,56 |
5,75 |
10 |
Tabela zestawiająca średnie temperatury przebiegów i średnie błędy regulacji:
Wartość zadana |
||||||||||
|
|
|||||||||
|
0 |
4 |
6 |
8 |
10 |
|||||
|
Tśr |
eśr |
Tśr |
eśr |
Tśr |
eśr |
Tśr |
eśr |
Tśr |
eśr |
|
|
|
|
|
|
|
|
|
|
|
0 |
44 |
-4 |
44 |
-4 |
43,6 |
-3,6 |
43,4 |
-3,4 |
43,1 |
-3,1 |
2 |
48,35 |
-8,35 |
48,35 |
-8,45 |
48,03 |
-8,03 |
47,7 |
-7,2 |
47,45 |
-7,45 |
4 |
53 |
-13 |
53 |
-13 |
52 |
-12 |
52 |
-12 |
52,5 |
-12,5 |
Określenie nastaw regulatora aby wartość temperatury obiektu regulacji nie przekroczyła więcej niż 5

ponad wartość zadaną tj. 40
:
Z tematu wynika jasno, że temperatura obiektu regulacji nie może przekroczyć temperatury 45![]()
dla określonych nastaw regulatora. Nastawy te można w łatwy sposób wyznaczyć na podstawie wykresu z rejestratora temperatury. Biorąc pod uwagę wartości średnie temperatur dla danych przebiegów, nastawy te wynoszą odpowiednio:

i

i

i

i

i
Wnioski:
Z charakterystyki skokowej temperatury widać jasno, że nastawy regulatora mają niebanalny wpływ na zachowanie się samego regulatora jak i całego układu regulacji. Pod pojęciem nastaw regulatora, w naszym przypadku dwustawnego RE3AH, mam na myśli szerokość strefy histerezy ![]()
oraz zakres proporcjonalności ![]()
. Po włączeniu układu regulacji obserwowaliśmy znaczny wzrost temperatury ponad wartość zadaną, a związane to było z dosyć dużą bezwładnością cieplna całego układu. Po ustaleniu się charakterystyki skokowej temperatury zmienialiśmy nastawy regulatora obserwując jednocześnie jak reaguje na te zmiany obiekt regulacji. Pierwsze pomiary rozpoczęliśmy od stałej wartości zakresu proporcjonalności ![]()
natomiast regulowaliśmy szerokością strefy pętli histerezy ![]()
. Dla takich warunków nietrudno zauważyć z charakterystyki skokowej, że wraz ze wzrostem szerokości strefy histerezy ![]()
przy ![]()
, zmniejsza się częstość przełączeń przekaźnika a tym samym zwiększają się czasy grzania i stygnięcia obiektu regulacji w wyniku czego zwiększają się amplitudy przebiegu temperatury.
Kolejnym krokiem było zwiększenie zakresu proporcjonalności do wartości ![]()
, zaś parametr ![]()
zmienialiśmy w identyczny sposób jak poprzednio. Przed pierwszym pomiarem dla tych nastaw należało znowu odczekać kilka chwil aż układ się ustabilizuje, a tym samym charakterystyka skokowa ustali się. Dla małych wartości parametru ![]()
częstotliwość przełączeń była na tyle duża a amplituda była na tyle mała, że trudno było wyznaczyć wartość maksymalną, minimalną czy też średnią temperatury. Natomiast wraz ze wzrostem strefy szerokości histerezy przy stałym współczynniku proporcjonalności charakterystyka skokowa temperatury stawała się coraz bardziej czytelna, tzn. częstotliwość przełączeń przekaźnika stopniowo zmniejszała się przez co wzrastały czasy grzania i stygnięcia obiektu regulacji i amplitudy przebiegu były większe. Nasuwa się również wniosek patrząc na wyniki oraz charakterystykę skokową, że wraz ze wzrostem parametru ![]()
wzrasta wartość średnia temperatury OR dużo ponad wartość zadaną a tym samym rośnie wartość średniego błędu regulacji ![]()
, który jest określony jako różnica wartości zadanej ![]()
i średniej temperatury ![]()
. Ogólnie można również powiedzieć, że im mniejsza szerokość pętli histerezy tym większa jest częstotliwość przełączeń przekaźnika, co zresztą jasno wynika z charakterystyki przekaźnika dwupołożeniowego.
Przy parametrze ![]()
widać, że średni błąd regulacji osiągną już znaczna wartość rzędu kilkunastu stopni. Ponieważ, średnia wartość temperatury dla wszystkich nastaw regulatora jest większa od wartości zadanej dlatego też średni błąd regulacji otrzymujemy ze znakiem ujemnym np. ![]()
.
Na papierze milimetrowy zamieszczono następujące charakterystyki:
Z charakterystyki ![]()
widać, że jest to zależność liniowa stała wraz ze wzrostem szerokości strefy histerezy, tym większa im większy jest parametr ![]()
czyli współczynnik proporcjonalności.
![]()
jest zależnością liniowo narastającą wraz ze wzrostem współczynnika proporcjonalności, przy czym nie ma tu większego znaczenia szerokość strefy histerezy.
Nietrudno zauważyć, że czas grzania jest zdecydowanie krótszy od czasu stygnięcia OR dlatego też iloraz odpowiednio czasu grzania do czasu stygnięcia będzie mniejszy od jedności. Zależność tego ilorazu w funkcji nastaw regulatora, przy czym jeden parametr regulujemy zaś drugi jest stały, jest liniowo narastająca lub malejąca i zawiera się w granicach od 0,3 do 0,7.
Wyszukiwarka
Podobne podstrony:
Automatyka i sterowanie, Sprawozdanie - regulatory pneumatyczne, Akademia Techniczno - Humanistyczna
Automatyka i sterowanie, regulatoryP,PI,PID, Akademia Techniczno-Humanistyczna
Automatyka i sterowanie, Pneumatyczne przyrządy pomiarowe, Akademia Techniczno - Humanistyczna w Bie
REGULACJA DWUPOŁOŻENIOWA1, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, AUT
ściąga 80, Akademia Techniczno-Humanistyczna w Bielsku-Białej, Fizyka labolatorium, Wymagania + pomo
2Materiały uzupełniające z OŚ, Akademia Techniczno-Humanistyczna w Bielsku-Białej, Ochrona Środowisk
spraw z fizy, AKADEMIA TECHNICZNO-HUMANISTYCZNA
Akademia Techniczn2, Akademia Techniczno-Humanistyczna
Akademia Techniczn2, Akademia Techniczno-Humanistyczna
36 nowe, Akademia Techniczno-Humanistyczna
Chemia fiz - spr8, Akademia Techniczno-Humanistyczna w
meteorologia, meteorologia Cw2 moje, Akademia Techniczno-Humanistyczna
więcej podobnych podstron