92835
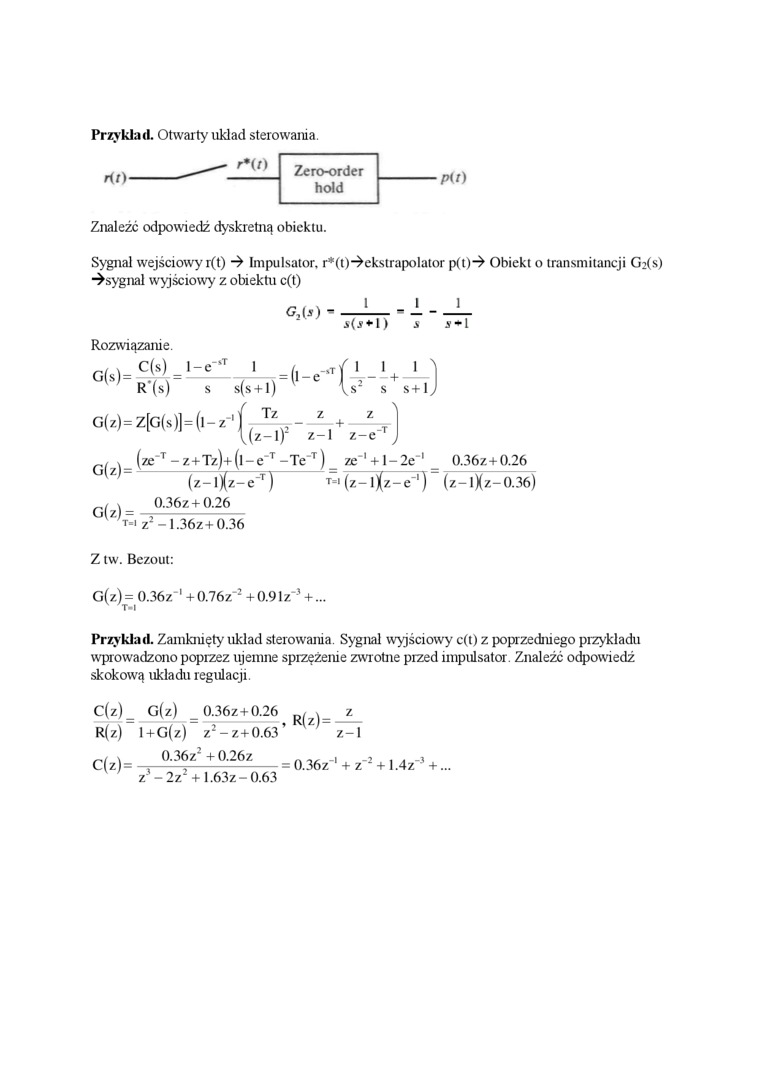
Przykład. Otwarty układ sterowania.
|
r*(/) |
Zero-order | |
|
hołd |
PU)
Znaleźć odpowiedź dyskretną obiektu.
Sygnał wejściowy r(t) Impulsator, r*(t)-^ekstrapolator p(t)—^ Obiekt o transmitancji G2(s)
-^sygnał wyjściowy z obiektu c(t)
G;(j) - -i- - - - —
S(j*l) 5 J + 1
Rozwiązanie.
G(s)
C(s) 1-e'
Z Z
+
z-1 z-e
R*(s) s s(s +1)
G(z)=Z(GU)]=(l-z'(|J'’ii?
( (ze~T -z-t-Tz)+(l-e~T -Te~T) _ ze'1 -ł-l-2e~l _ 0.36z+0.26
(z-l)(z-e"T) T=l (z-ljfz-e1) (z-lXz-0.36)
, x 0.36z + 0.26
Glz) = —z--
T=l z2 - 1.36z+0.36
Z tw. Bezout:
G(z) = 0.36z"‘ + 0.76z'2 + 0.9 lz"3 +...
T-l
Przykład. Zamknięty układ sterowania. Sygnał wyjściowy c(t) z poprzedmego przykładu wprowadzono poprzez ujemne sprzężenie zwrotne przed impulsator. Znaleźć odpowiedź skokową układu regulacji.
C(z) _ G(z) _ 0.36z+0.26 p, v z R(z) 1 +G(z) z2 - z + 0.63’ Z z-1
z - 2z + 1.63z- 0.63
. 0.36z‘ + 0.26z
c(z)= _3 „ 2-
= 0.36z 1 + z 2 + 1.4z 3 +
Wyszukiwarka
Podobne podstrony:
Otwarty układ sterowania X Urządzenie u Obiekt (proces) sterujące sterowania x -
Zero Order Hold Zero-Order Hołd
Zero Order Hold blok Błock Paramełers: Zero-Order Hołd Zero-Order Hołd Zero-order hołd. Parameters S
DSC00552 (9) wafflrRozpatrzmy otwarty układ sterowania poziomem cieczy w zbiorniku z m odpływem graw
Jeśli otwarty układ sterowania jest stabilny to będzie również stabilny po zamknięciu w przypadku:
Układ sterowania i układ regulacji W układach automatyki wyróżnia się otwarty układ sterowania zwany
Otwarty układ sterowaniaZamknięty układ sterowania -V" _ _ _
Układ automatycznego sterowania w systemie otwartym Układ nazywa się układem automatycznego sterowan
układ sterowania obiektem w systemie otwartym u=At y=Ah Jest to układ regulacji ręcznej. Człowiek pe
Układ sterowania - schemat blokowy Rysunek : Układ sterowania (otwarty)- schemat blokowy. Oznaczenia
PA170718 Przykłady układów w technice i w silnikach układ automatyki, układ sterowania, układ adapta
więcej podobnych podstron