7133531534
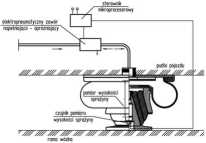
Rys. 3. Ogólny układ spręży ny pneumatycznej sterowanej mikroprocesorowo
zatoczenie zaworu ep opróżniania \
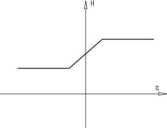
Rys. 5. Wielkość histerezy w funkcji prędkości pojazdu
Rys. 6. Zmiana wysokości spręży ny pneumatycznej w funkcji przyspieszenia dośrodkowego


- zmienną regulowaną wysokość podłogi pojazdu (możliwość automatycznego dopasowania się wysokości pudła do zróżnicowanej wysokości peronów),
- realizację sztucznej wymuszonej przechyłki pojazdu w luku w funkcji zmierzonego przyspieszenia dośrodkowego (poprawa komfortu i możliwość zwiększenia prędkości maksymalnej pojazdu w luku),
- możliwość wprowadzenia zmiennej histerezy zawieszenia pneumatycznego ( rys.4) w zależności od parametrów dynamicznych zmierzonych podczas jazdy pojazdu np. prędkości (rys.5) czy przyspieszeń (rys.6). Na przykład dla prędkości V=0 km/h histereza może wynosić ± 1 mm, a dla innych prędkości może być regulowana i zmieniać się np proporcjonalnie do prędkości.
należenie A przepływu
zataczania zaworów ep
\ zatączenie zaworu ep napetniania
Rys.4. Histereza i charakterystyka natężenia przepływy powietrza przez elektrozawór sterowany mikroprocesorowo
3. Elementy zawieszenia pneumatycznego pojazdu
W ramach projektu opracowano dwa siłowniki (sprężyny) pneumatyczne pokrywające zapotrzebowanie obciążeń stosowanych w pojazdach szynowych. Zgodnie z podstawowymi parametrami charakteryzującymi przedmiot wdrożenia opracowane siłowniki powinny pokryć zapotrzebowanie obciążenia pionowego co najmniej w zakresie 8-16 ton masy pudla pojazdu przypadającego na jeden siłownik (sprężynę). W związku z powyższym do realizacji przyjęto dwa rodzaje sprężyn pneumatycznych: o średnicy około 600 mm i o średnicy 800 mm (rys. 7).
g
Rys. 7. Widok ogólny przyjętych do realizacji sprężyn pneumatycznych
Sprężyna o średnicy 600 mm (dla lekkich pojazdów szynowych) może realizować następujące obciążenia: -przy ciśnieniu 200 kPa około 5 650 kg,
-przy ciśnieniu 400 kPa około 11 300 kg. Sprężyna o średnicy 800 mm może realizować następujące obciążenia:
-przy ciśnieniu 200 kPa około 10 000 kg,
-przy ciśnieniu 400 kPa około 20 000 kg. Zakłada się, że dla obu sprężyn pneumatycznych następujące podstawowe parametry:
-maksymalne dopuszczalne ciśnienie 700 kPa, -maksymalne ciśnienie robocze 500 kPa, -minimalne ciśnienie robocze 100 kPa, -maksymalne ugięcie pionowe około 60 mm, -maksymalne odbicie pionowe około 160 mm
POJAZDY SZYNOWE NR 2/2012
Wyszukiwarka
Podobne podstrony:
79734 OMiUP t2 Gorski38 Rys. 7.70. Układ sprzężenia zwrotnego w urządzeniu sterowym typu MS 100 N4 (
OMiUP t2 Gorski41 Rys. 7.72. Układ sprzężenia zwrotnego w urządzeniu sterowym typu MS 100 N5 („Hydro
Rys. 12. Układ mikroprocesorowego sterowania wysokością sprężyny pneumatycznej na stanowisku
Image1�01 Wysokiej klasy przedwzmacmacz ze sterowaniem mikroprocesorowymNowy Elektronik 135-K Prezen
Image600 r W skład mikrokomputera wchodzi: — układ sterowania mikroprogramem (MCU)
skanuj0076 2 Pomiary twardości 77 Rys. 5.17. Układ lampek kontrolnych sterowania siłą w aparacie Mik
Widok finalnego układu sterowania zdarzeniami przedstawiono na rys. 16. Rys. 16. Układ sterowania
SAVE0436 [] Rys; 39 2. Pneumatyczne sterowanie z mechanicznym impulsem (rys. 89) składa się z ręczne
skanowanie0008 (13) Wejścia informacyjne w kodzie SCO 8£21 Rys. 3.51. Układ sterowania półprzewodnik
przedwzm uc Wysokiej klasy przedwzmacniacz ze sterowaniem mikroprocesorowymNowy Elektronik 135-KPrez
Rys. 1. Ogólny schemat prostego układu sterowania przepływem produkcji Analizując system sterowania
1004547b1918051204360P3706884 n $0h. s Rys. 47. Motylica wątrobowa ~ ogólny układ narządów. 1 &
Rys. 3.6. Ogólny widok siłownika pneumatycznego Zbiornik z gazem Zawór
Rys. 13. Układ sterowania przekształtnika do współpracy z ogniwami fotowoltaicznymi PV Topologia
więcej podobnych podstron