9142890852
Rysunek 11 Model ortezy z bierną kompensacją grawitacji w formie sprężyny

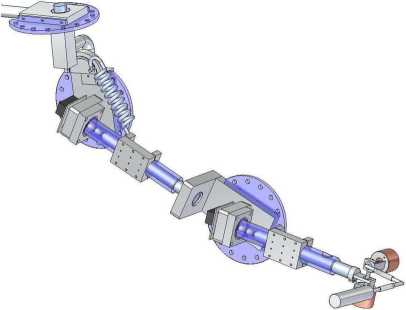
Rysunek 12 Model ortezy z przeciwwagową kompensacją grawitacji
System sterowania robotów składa się z części sprzętowej oraz współpracujących ze sobą programów. Dzięki temu podejściu możliwe było wprowadzenie modułowości do systemu
14
Wyszukiwarka
Podobne podstrony:
> Zarządzanie sieciami WAN <11 Rysunek 12. Wykorzystanie publicznej sieci telefonicznej do prz
Schowek03 (11) Model zdalnie sterowany Zdalne sterowanie modeli za pomocą fal radiowych cieszy się
skanuj0004 (13) Model 11.Model 12. Materiały: 10gambma
skanuj0001(11) MASY GEN Rosnowa piaskowa, glina formierska) -tanie, doskonałe -twardość żywotność ma
Rysunek 11. Wejście do Instytutu maszyn Przepływowych PAN od ulicy Fiszera. Rysunek 12. Poziom II La
gdzie A oznacza długość fali źródłowej. Przedstawiony w równaniach 1.9-1.11 model został zmodyfikowa
79243 skanuj0004 (13) Model 11.Model 12. Materiały: 10gambma
Zdjęcie059 (11) Model matematyczny układu Równanie bilansu ciśnień Ps =4Pi + Ap + Ap2+/>W4Pi=Ąp2
Schowek03 (11) Model zdalnie sterowany Zdalne sterowanie modeli za pomocą fal radiowych cieszy się
Schowek03 (11) Model zdalnie sterowany Zdalne sterowanie modeli za pomocą fal radiowych cieszy się
ZT116 (2) 230 CZĘŚĆ 3. ZARZĄDZANIE TURYSTYKĄ A ŚRODOWISKO RYSUNEK 12.1 Model współrządzenia w kontek
4. Obliczenia tcyirzyma/ośc/o** p zbiorników cienkościennych 131 gtąp 11 - model płytowy zbiornika C
55249 Zdjęcie059 (11) Model matematyczny układu Równanie bilansu ciśnień Ps =4Pi + Ap + Ap2+/>W4P
rys5 11 z Rys. 5 .11. Model anizotropii modułu sprężystości żelaza (Goens, Schmid)
więcej podobnych podstron