9142890861
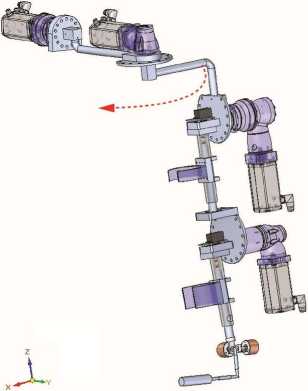
Rysunek 2 Projekt aktywnej ortezy (egzoszkieletalnej części robota)
W trakcie realizacji pracy wykonano również innego robota przeznaczonego do rehabilitacji kończyny górnej (zwanego Simple Upper Limb Rehabilitation Robot), który odznaczał się o wiele prostszą konstrukcją i mniejszą liczbą stopni swobody. Robot ten z założenia mógłby być stosowany w użytku domowym.

Rysunek 3 Robot zwany Simple Upper Limb Rehabilitation Robot również wykonany w ramach niniejszej pracy
Wyszukiwarka
Podobne podstrony:
Rysunek 6 Efektor -wózek W33.2 Przekładnia Główną kwestią podczas realizacji pracy był problem
Rysunek 11 Model ortezy z bierną kompensacją grawitacji w formie sprężyny Rysunek 12 Model ortezy z
3. WYKONANIE ĆWICZENIA W trakcie realizacji części praktycznej ćwiczenia należ}’ wykonać
Rydzanicz (81) Rys. 10.6 Rysunek projektowy przekładni zębatej — układ pionowy
J Robot Pomóż czarodziejowi znaleźć części robota z nalepki i pokoloruj je.
MIECZYSŁAW podstawy projektowania procesów technologicznych typowych części
MIECZYSŁAW FELI Podstawy projektowania procesów technologiczny! typowych części maszyn
Rysunek projektu powinien zawierać • granice obszaru objętego etudum lub
Możliwości systemu ISOF-STARTSekretariatWsparcie menadżerów Rysunek21: Kalendarz aktywności
Komitetu. W trakcie realizacji projektu do zadań sponsora należy: odebranie produktów projektu, ocen
t2 t2 Metal B t1 Rysunek 1. Konstrukcja złącza termopary. W lewej części rysunku widoczny jest
z obciążeń zmiennych, których przeniesienie jest celem projektowanego obiektu lub jego części
7 (25) 7 Projekt technologiczno-organizacyjny (potrzebne w trakcie realizacji): >
więcej podobnych podstron