4243057742
-i
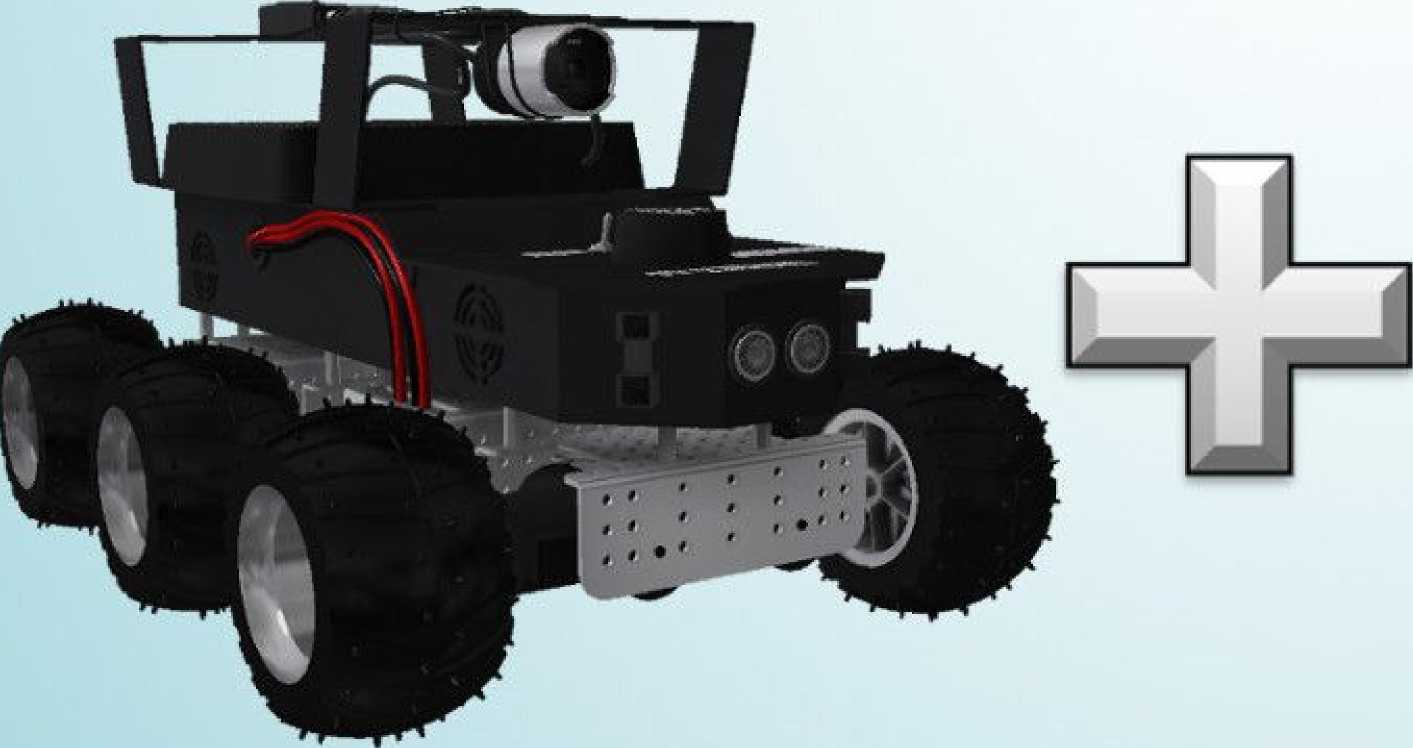
Model symulacyjny robota Explorer 6WD z uwzględnieniem uszkodzeń

1“
Ii
|
9 ^5®5 | ||
|
1 fn i 1 1 *— |
( | |
|
■Ti>Ł_ | ||
|
; r ^ 1 |
UJ
i
/
,
m
\
\ i.
TT

\
\
J
/

V

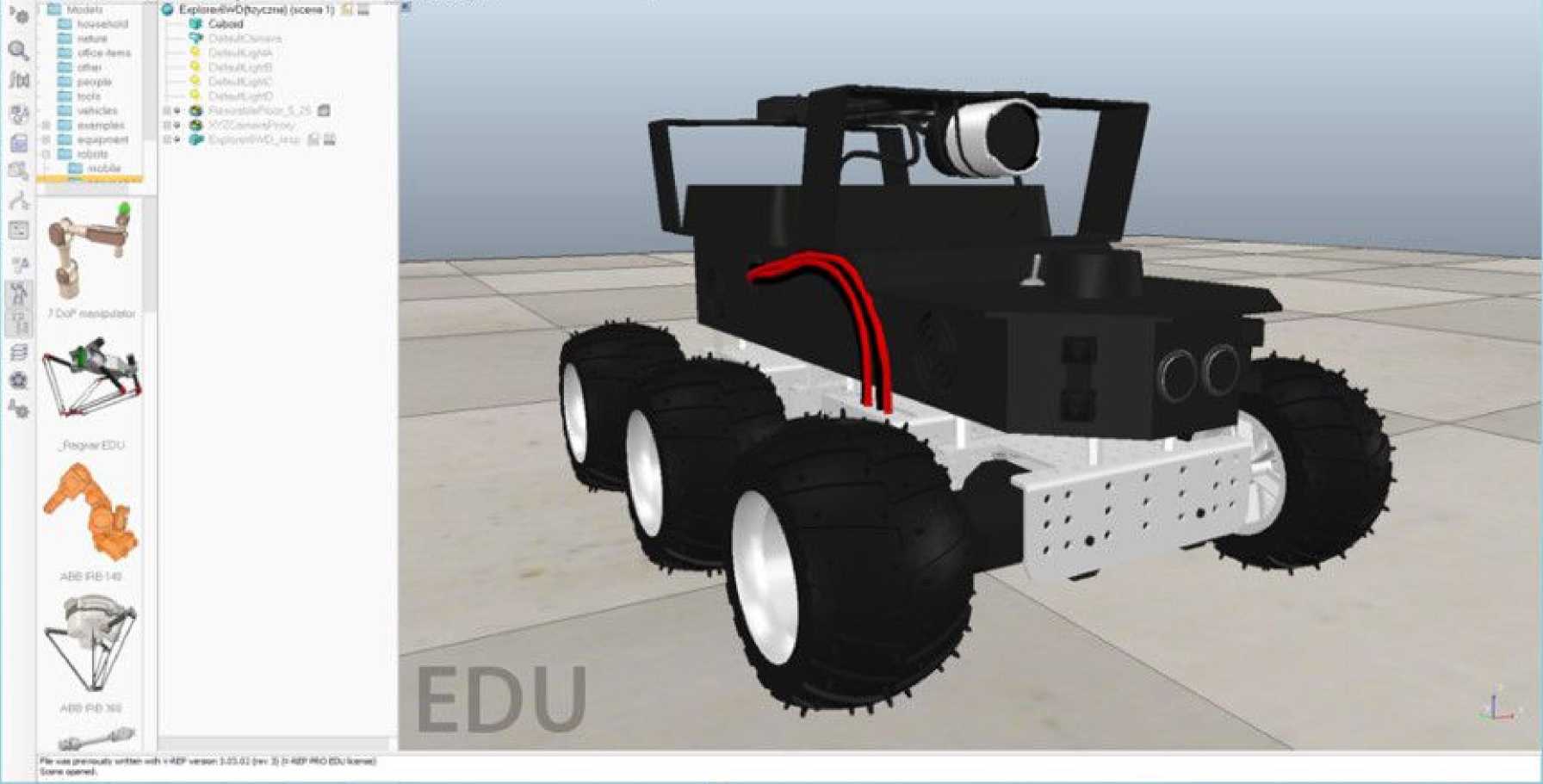
1 V R£P PRO EDŁT lj®(OI«6WD(TuPpO»W|' <OTKJ*N ifig 2 ffl>i (F.9 Ips) * Nl MOL Al IOW ŁTOPPED ** O
pfei tir -vc Snjaar ~m Aari-n larw w
■ę-* •p- nJu jy jp’: jPV ■Jr. <f4# . np®' jp> jj pjp; ^ p UPWK' ,b ■ rj- 'Vr5 _ V
ygwyp >' '!■:#■■=* jf p £—r^ri rjbĘĘ^m I
r


różne środowiska
|
| INSTYTUT PODSTAW KONSTRUKCJI MASZYN | |
|
TYTUŁ: |
Model symulacyjny robota Explorer 6WD z uwzględnieniem u szkodzeń |
|
AUTOR: |
| inż. Pawet Stęczniewski 1 |
|
KIERUNEK: |
| Automatyka i Robotyka 1 |
|
OPIEKUN: |
I dr inż. Piotr Przystatka 1 |
|
ROK: |
| 2016/2017 1 |
Wyszukiwarka
Podobne podstrony:
1 1 1 7 / 7 / // /// / // / 1 ii < /# / y /y 1 1,1 f # f U łti — / i * M (m *M * 1 1S i i 1 (I
*1S II s- 1 1 LŁ • • >■ %
prog i symulacje 3 A. y ko. pt Ot tfokrnś ? p m L. -*Wi tf?/ O ii
Egzamin pisemny w semestrze 5, z uwzględnieniem standardów ESOKJ. II.Ii.14 Spis zalecanych lektur i
Image343 ceń i uszkodzeń w systemie. Należy również uwzględnić zagadnienia przetwarzania tego kodu n
f) analiza rodzajów uszkodzeń i ich skutków (FMEA), g) symulacja
- 116 - Rys. t>. Procedura lokalizacji uszkodzoń pil toclunezny umożliwia symulację transmisji WE
Symulacja komputerowa mechanizmu tworzenia się rys w dźwigarze 99 zespolonych. Obraz uszkodzeń otrzy
10. Temat projektu/pracy dyplomowej magisterskiej (jęz. poi.) Symulacja ruchu robota
ZŁAMANIA OBOJCZYKA W różnicowaniu uwzględnić porodowe uszkodzenie splotu ramiennego, złamanie kości
• Wnioskowanie z uwzględnieniem przedziału opóźnień symptomów dla każdej pary uszkodzenie-symptom
Uwzględniono nowelizacje obowiązujące od 1S kwietnia 2016 r.
40. Komputer kieruje pracą robota, który: a) zastaje określoną sytuację i b) po uwzględnieniu
więcej podobnych podstron