1181721766
3. Spinczyk D., Karwan A., Copik M., 2014, Methcxis for abdominal respiratory motion tracking. Computer AidedSurgeiy 19(l-3):34-47.
Cel: metoda dopasowania powierzchni jamy brzusznej pacjenta w różnych fazach procesu oddechowego.
Zaproponowane rozwiązanie', opracowanie nowej metody niesztywnego dopasowania powierzchni z wykorzystaniem wiedzy o położeniu markerów na etapie znajdowania odpowiedników w pierwszej fazie każdej iteracji algorytmu.
Algorytm traktuje dopasowywane powierzchnie jako zbiory punktów. W rozważanym przypadku są mapy głębi powierzchni jamy brzusznej w przeciwstawnych fazach cyklu oddechowego: (wdech-wydech) wraz z umieszczonymi na niej markerami (Rys. 3) uzyskane z kamery typu Time of FlighL Rezultatem działania algorytmu jest znalezienie szukanej transformaty, w przypadku dopasowywania niesztywnego w postaci niezależnej transformacji sztywnej lub afinicznej dla każdego punktu chmury.
Każda iteracja algorytmu składa się z 2 kroków: znajdowania odpowiedników w oparciu o kryterium odległości Euklidesowej oraz obliczaniu nowej transformaty wynikowej na podstawie znajdowanych odpowiedników. Amberg zaproponował wykorzystanie wiedzy o położeniu markerów w zbiorach źródłowym i docelowym celem naprowadzania algorytmu w drugim etapie iteracji. Autor zaproponował rozszerzenie tej koncepcji poprzez wykorzystanie wiedzy o położeniu markerów również na pierwszym etapie iteracji algorytmu.
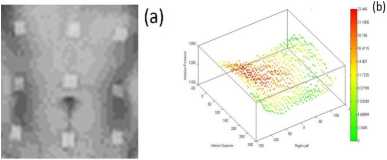
Rys. 3. Mapa intensywności powierzchni brzucha z dziewięcioma markerami (a). Mapa odległości pomiędzy początkową a końcową pozycją powierzchni brzucha (b) [4].
Doprowadziło to do opracowania nowych sposobów znajdowania odpowiedników oraz znaczącej poprawy dopasowania zbiorów punktów. Prezentowana nowa koncepcja została przedstawiona szerszemu gronu odbiorców na konferencji The 2014 International Conference on Image Processing, Computer Vision, and Pattem Recognition. Prezentacja konferencyjna została zakwalifikowana do publikacji w Emerging Trends in Image Processing Computer Yision and Pattem Recognition.
Wyszukiwarka
Podobne podstrony:
1. Spinczyk D., Karwan A., Żyłkowski J., Wróblewski T.: In-vitro Evaluation of Stereoscopic Liver Su
14.3.2014 Tools for Educators - ffee printable word search maker XtAtr * te
S The header address also describes the sequence for reassembly at the destination Computer so that
Kalman-Bucy Obsener Design for Multivanable Ship Motion Control Mirosłcnv TOMERA Optimum Operation o
auma® Solutions for a world in motionlEHgH AKTORIK BROSZURA INFORMACYJNA O PRODUKCIE
ments the impedance presented by thc bow to the string was deter-mined. The method for measuring str
finland (2) finland Kas a -6 for dfrect contro! of any Computer group, and g?ves a +2 to ony attempr
nr 8 560 Standards for global interoperability in accelerated computing: hardware, software and orga
siedem 5 tworzenie konta Set Up WindowsSS. Windóws 7 Ultimate Chccse a user name for your acccunt an
Jhcre to look for good architccture? Significant buildings constructcd n Poland 1989-2014 ho co
Cluster as an opportunity for medical tourism in Poland 115 Medi-Tour, 2014;
Załącznik nr 8do Zarządzenia Rektora Nr 32 -.2013/2014 ANNEX no.1 RECOMMENDA TION FOR STUDENT
Załącznik nr 9 do Zarządzenia Rektora Nr 32 -.2013/2014 ANNEX no.1 TO RECOMMENDATION FOR A STUDENT
Trochę dalszych danych statystycznych... Annual suppły of industrial robots 2014-2015 and torecast f
QP Codc: 13900 3. (A) Mr. Karnik sold on 10.06.2014 his residcntiai house in Nashik for ? 75,00.000.
11416191?7383662010831C53661622350311617 n Kolokwium zaliczeniowe - Systemy operacyjni , studia nies
SimLab Composer 2014 SP1 (Animation Edition) (Trial License, NOT For Commercial usage) - n Ł File E
więcej podobnych podstron