1954687438
12
gdzie T(tx, ty) jest operacją translacji z parametrami tx i ty.
Skalowanie ze współczynnikami skalowania sx i sy odpowiednio względem osi OX i OY przekształca punkt [x,y\ w nowy punkt \x',y']. Zapisuje się to w postaci:
[x',y', 1] = [x,y, 1] •
|
sy |
0 |
0 |
|
0 |
Sy |
0 |
|
0 |
O |
1 |
(3)
gdzie S(sx,sy) jest operatorem skalowania z parametrami sx i sy odpowiednio względem osi OX i OY.
Rotacja punktu [x,y] o kąt p względem początku układu współrzędnych przeprowadza go w nowy punkt [x',y']. Kąt obrotu jest dodatni, gdy obrót odbywa się w kierunku przeciwnym do ruchu wskazówek zegara. Rotacja może być zapisana w postaci macierzowej:
|
COS(p |
sin(/? |
0 |
|
— sin(£> |
cos ip |
0 |
|
0 |
0 |
1 |
[x,y, 1] -R(v), (4)
gdzie R(<p) oznacza operator obrotu o kąt <p względem początku układu współrzędnych.
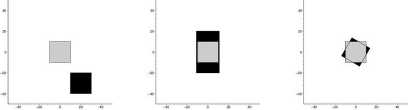
(a)
(c)
(b)
Rysunek 8: Przekształcenia 2D: (a) translacja, (b) skalowanie, (c) rotacja.
Przekształcenia 3D
Punkty w przestrzeni 3D to wektory wierszowe [x, y, z], które we współrzędnych jednorodnych przedstawia się jako [x, y, z, 1].
Wyszukiwarka
Podobne podstrony:
yi = -0.1 xj + 12; gdzie yj jest stopą bezrobocia w i-tym kraju, a xj stopą opodatkowania najbogatsz
WO - 0/12 82 gdzie: gQ mm - jest obliczeniową grubością pełnego dna płaskiego, z - jest współczynnik
Untitled 12 (5) GDZIE JEST BUT? ©W8R RELACJE CZASOWE 1 PRZESTRZENNE
82889 Untitled 12 (5) GDZIE JEST BUT? ©W8R RELACJE CZASOWE 1 PRZESTRZENNE
pkm osinski�98 tw 4. I.o*y»kovnnic W celu ułatwieniu obliczeń przedstawimy ten wzór w postaci (4.12)
Img00012 (2) 16 E = hv = hc/A. (1.12 1) gdzie: h jest stałą Plancka, równą 6,625 •
£Wr-rów = n sti t
kach. Z tego powodu konieczne jest określenie właściwych parametrów nastawczych procesu oraz rzeczyw
12 Kinga Bauer sowej jest trudniejszy. Od 2008 roku sytuacja ta uległa dodatkowemu pogorszeniu z pow
skanuj0119 (12) Zjawisko kawitacji Kawitacja jest zjawiskiem fizycznym, które wywołane j zmiennym ci
Skrypt PKM 1 00006 12 Rozwiązanie całego zadania jest jednak nieoznaczone, gdyż oprócz równaó (1.2),
więcej podobnych podstron