8592539632
Prototypowanie algorytmów sterowania. 157
Obiekt (1) zaimplementowany został w środowisku Matlab/Simulink (rys. 5) wraz z elementami odpowiedzialnymi za pobieranie sygnału sterującego oraz wysyłanie sygnału regulowanego i wartości zadanej do mikrokontrolera MPC555. Na schemacie tym uwzględniono także ekstrapolator ZOH oraz elementy próbkujące. Symulacja odbywa się w czasie rzeczywistym, co zapewnia element RTBlock [3].
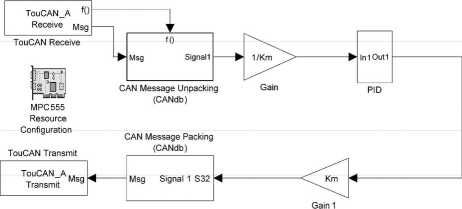
Rys. 6. Regulator PID w MPC555 Fig. 6. PID controller in MPC555
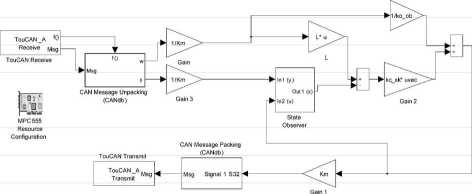
Rys. 7. Regulator LQ w MPC555 Fig. 7. LQ controller in MPC55
Wyszukiwarka
Podobne podstrony:
Prototypowanie algorytmów sterowania. 153 obiektu y(t) jest próbkowane także z okresem h. Dla chwil
20. Pietrusewicz K., Prototypowanie algorytmów sterowania cyfrowego serwonapędu
Prototypowanie algorytmów sterowania. 155 / = lim ^(AxMQAxM + pAuf) = lim — ^(Ar,.g,Ar,. +2Ax ql2ui
Prototypowanie algorytmów sterowania. 159 nakład pracy potrzebny do zaprojektowania i przetestowania
Prototypowanie algorytmów sterowania. 161BIBLIOGRAFIA 1. Goodwin G., Graebe S., Sa
Prototypowanie algorytmów sterowania. 151 Rys. 1. Projektowanie bazujące na modelu - diagram V Fig.
Przebieg zajęć: 1 W środowisku MATLAB-SIMULINK przygotować odpowiednie schematy złożone ze źródła
Wrocław. Badania symulacyjne elementów automatyki w środowisku Matlab-Simulink
Opis modelu obiektu sterowania nr 2 Metalowa kulka została zamieszczona na pochylni, której kąt jest
Wykres po zaimplementowaniu kodu programu; 3. Podsumowanie Program został napisany w środowisku Matl
Tematy prac dyplomowych lO.Stanowisko dydaktyczne do badania algorytmów sterowania obiektem oscylacy
image006a CorelDRAW 8 - Wskaż ścieżkę tekstu E3 Obiekt nie został- zaznaczony. Czy chcesz spróbować
Zamknięty układ sterowania X 6 ► Urządzenie u Obiekt
więcej podobnych podstron