9414912286
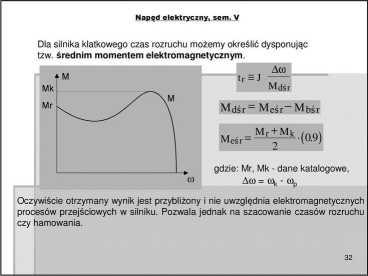
Napęd elektryczny, sem. V
Elementarne przykłady całkowania równania ruchu
Podstawowe równanie ruchu:
,dtO
J— = Me-Mm = Md dt
Czas trwania stanów przejściowych (Md * 0) możemy wyznaczyć z powyższego równania w następujący sposób:
dco
t = JJ-
' (Me-Mm)
Niestety w praktyce inżynierskiej zwykle utrudnione jest korzystanie z tego równania z następujących powodów:
- nieznajomość charakterystyki Me = f(co),
- nieznajomość charakterystyki Mm = f(co),
- trudności z analitycznym rozwiązaniem najczęściej nieliniowych równań. Dlatego też w praktyce inżynierskiej koniecznym staje się zastosowanie uproszczeń, czynionych z pełną świadomością.
31
16
Wyszukiwarka
Podobne podstrony:
Napęd elektryczny, sem. V Przykłady maszyn roboczych współpracujących z elektrycznymi układami
Napęd elektryczny, sem. V Przykłady maszyn roboczych współpracujących z elektrycznymi układami
Napęd elektryczny, sem. V Przykłady maszyn roboczych współpracujących z elektrycznymi układami
Napęd elektryczny, sem. V W przypadku, gdy moment dynamiczny Md (niezależnie od rodzaju silnika) jes
Napęd elektryczny, sem. V Na podstawie schematu blokowego możemy wyznaczyć następujące
Napęd elektryczny, sem. VProgram wykładów (15 godz.): 1. Podstawowe cechy napędu
Napęd elektryczny, sem. V G3(s) = II(S) _R _ _U(s) Tm-Tt-s2 + Tm-s +1 G4(s) : It(s
Napęd elektryczny, sem. V Cechy silników elektrycznych z punktu widzenia zastosowania ich w układach
Napęd elektryczny, sem. V Ogólna struktura układu napędowego ZE - źródło energii (elektrycznej), PK
Napęd elektryczny, sem. V Charakterystyki mechaniczne silników elektrycznych Z punktu widzenia napęd
Napęd elektryczny, sem. V Przekładnia mechaniczna PM (połączenie mechaniczne) Możliwe są
Napęd elektryczny, sem. V Typowe charakterystyki mechaniczne maszyn roboczych MR Moment w napędzie
Napęd elektryczny, sem. V Typowe charakterystyki mechaniczne maszyn roboczych MR Moment w napędzie
2tom232 Napęd elektryczny prof. dr bab. inż. Kazimierz Bisztyga6.1. Równanie ruchu napędu Układ napę
Mechanika12 Przykład 18. f ■ Równania ruchu mają postać:b /, x b . , . t x = — (1
w przybliżeniu i w ograniczonym zakresie do cząstek elementarnych). Przykładowo: ruch elektronu wyni
więcej podobnych podstron