2121403381
3. BADANIE PARAMETRÓW MAGNETYCZNYCH MATERIAŁU
Materiałem konstrukcyjnym elementów maszyn jest w przeważającej mierze stal. Stal konstrukcyjna charakteryzuje się małym współczynnikiem magnetostrykcji A, a tym samym niewidką czułością magnctospręźystą S [39], Mała czułość magnetosprężysta omawianych materiałów wykluczyła je z kręgu badań efektu Villariego ze względu na brak zastosowań magnetostrykcyjnych. Mała czułość magnetosprężysta tych materiałów nic wyklucza ich z kręgu badań magnetycznych dla diagnostyki.
Badaniom poddano wąską grupę stali niskostopowych i niskowęglowych, stosowanych do produkcji zestawów kołowych. Ograniczenia dotyczące wymiaru próbek, a przede wszystkich ich przekroju, podyktowane były specyfiką badań i urządzeń badawczych oraz dostępnym zakresem obciążeń mechanicznych. Ze stali na zestawy kołowe oraz dodatkowo z St3S przygotowano specjalne próbki prętowe o długości 200 mm i przekroju 2x2 mm.
3.1. Stanowisko pomiarowe i kalibracja układu pomiarowego
Na rozwiązanie konstrukcyjne stanowiska pomiarowego miał wpływ sposób zadawania obciążeń i sposób pomiaru parametrów magnetycznych oraz kształt i wymiar próbek. Stanowisko składa się z układu mechanicznego i układu pomiarowego. Schemat układu pomiarowego zamieszono na rysunku 3.1. Podstawowymi elementami układu są: cewka długa, o wymiarach zapewniających jednorodne pole magnesujące, cewka pomiarowa i obwody pomiarowe natężenia pola i indukcji magnetycznej.

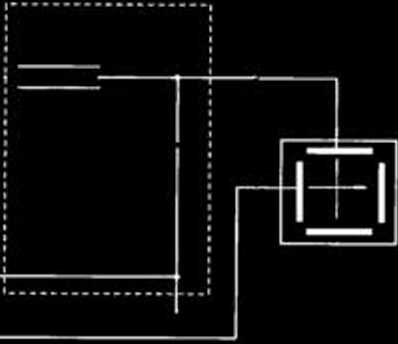
Rys 3.1. Układ do pomiaru dynamicznych pętli histerezy Fig. 3.1. Dynamie hysleresis loop measurement Circuit
Natężenie pola magnetycznego // przypadające na działkę d osi x oscyloskopu pomiarowego dla wykonanego układu wyznaczono z zależności:
H/d =

R.L

(3.1)
gdzie: D\ - współczynnik odchylania wzmacniacza X, zi - liczba zwojów uzwojenia pierwotnego,
Ri - szeregowa rezystancja w uzwojeniu pierwotnym,
L - średnia droga strumienia magnetycznego.
Aby uzyskać pętlę histerezy, napięcie doprowadzone do toru Y powinno być proporcjonalne do indukcji magnetycznej B. Napięcie proporcjonalne do B otrzymuje się po scałkowaniu napięcia u2. Jeżeli R »l/(aC), wtedy układ ten można traktować jako całkujący ograniczający błąd. co sprawdzono na próbkach wzorcowych. Przy znanym współczynniku odchylania oscyloskopu w kierunku osi Y indukcja magnetyczna dla działki d odchylenia osi y oscyloskopu wyznaczana jest z zależności
B/dm££L.I0\ (3.2)
ZjS
gdzie: R - rezystancja układu całkującego,
C - pojemność układu całkującego,
Dy - współczynnik odchylania wzmacniacza.
Z2 - liczba zwojów uzwojenia wtórnego,
S - przekrój rdzenia.
Wyznaczone przeliczniki wartości natężenia pola magnetycznego H oraz indukcji magnetycznej B na 1 działkę ekranu oscyloskopu posłużyły do skalowania przebiegów pętli histerezy magnetycznej.
Układ mechaniczny do naprężania próbek wyposażono w czujnik siły. Widok stanowiska pomiarowego przedstawiono na rysunku 3.2.

Rys 3.2. Stanowisko pomiarowe do wyznaczania pętli histerezy w funkcji naprężeń Fig. 3.2. Measuring post for determming hysteretic curees as function of stress
Wyszukiwarka
Podobne podstrony:
zasadzie interferencji Badanie właściwości magnetycznych materii przy użyciu magnetometru
KONSTRUKCJE - ELEMENTY - MATERIAŁY KONSTRUKCJE - ELEMENTY - MATERIAŁY ARTYKUŁY PROBLEMOWE Tabela 2.
KONSTRUKCJE - ELEMENTY - MATERIAŁY KONSTRUKCJE - ELEMENTY - MATERIAŁY ARTYKUŁY PROBLEMOWE szanki, wp
Zastosowanie żeliw szarych: powszechnie stosowanym materiałem konstrukcyjnym w przemyśle maszynowym,
zasadzie interferencji Badanie właściwości magnetycznych materii przy użyciu magnetometru
MATERIAŁY KONSTRUKCYJNE W BUDOWIE MASZYN I URZĄDZEŃ - NOWE MATERIAŁY, KOMPOZYTY I TWORZYWA
ANDRZEJ CISZEWSKI TADEUSZ RADOMSKI Materiały konstrukcyjne w budowie maszyn
zasadzie interferencji Badanie właściwości magnetycznych materii przy użyciu magnetometru
zasadzie interferencji Badanie właściwości magnetycznych materii przy użyciu magnetometru
— 124 to to U) ~ O) OJ co 9 240 Ćwiczenia konstr. z elementów maszyn II.
4 ?dania zmęczeniowe metali�0 4o BADANIA ZMĘCZENIOWE METALI . . . . - /4.1. Pojęcia podstawowe 4.1.1
Kryteria doboru stali stopowych na elementy konstrukcyjne i elementy maszyn PROCEDURA DOBORU Podstaw
Kryteria doboru stali stopowych na elementy konstrukcyjne i elementy maszyn - HARTOWNOŚĆ ŚREDNICA PR
ODWZOROWANIE I ZAPIS KONSTRUKCJI Z ELEMENTAMI MASZYNOZNAWSTWA 1. Cele kształcenia Uczeń w wyniku
Konstruowanie elementów maszyn
Własności budowlanych materiałów konstrukcyjnych Jednym z zasadniczych elementów są badania
Własności budowlanych materiałów konstrukcyjnych Jednym z zasadniczych elementów są badania
więcej podobnych podstron