2278215109
1.2. Serworozdzielacz
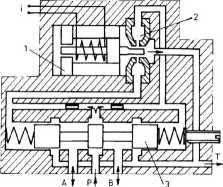
Rys. 1.3. Schemat serworozdzielacza; 1-silnik momentowy, 2-dysza, 3-suwak rozdzielacza [2].
Jednym z głównych elementów sterowania w układach hydraulicznych wykonanych w technice serwo jest serworozdzielacz. Na ogół serworozdzielacz (rys. 1.3) jest przynajmniej dwustopniowy. Zasadniczymi częściami są: silnik momentowy /, wzmacniacz mecha-niczno-hydrauliczny typu dysza-przysłona 2 oraz stopień mocy 3. Sygnał prądowy doprowadzany do silnika momentowego jest przekształcany w przemieszczenie przysłony, która w stanie wysterowanym powoduje przydławienie wypływu z jednej dyszy, a zwiększenie wypływu - z drugiej. Powstała w ten sposób różnica ciśnień kaskadowych powoduje przesunięcie suwaka w stopniu mocy. W rezultacie odpowiednie krawędzie sterujące suwaka utworzą pole przekroju przepływowego proporcjonalnego do wartości prądu sterującego. Wielkość wyjściowa (pole przekroju przepływowego) serworozdzielacza w stanie ustalonym może być proporcjonalna do prądowego sygnału wejściowego, czyli strumień objętości Q w kanałach P-A (lub P - B) może być proporcjonalny do przemieszczenia suwaka, czyli też do prądu sterującego. Jednak Q zależy silnie od spadku ciśnienia na krawędziach sterujących. Powyższy spadek ciśnienia, przy stałym ciśnieniu zasilania (kanał P) zależy od tzw. ciśnienia obciążenia (w kanale A lub B), które jest miarą wszystkich oporów związanych z ruchem napędzanego odbiornika, np. siłownika. Serworozdzielacze mają wzmocnienie około kilkaset tysięcy i są najbardziej precyzyjniejszymi zespołami hydraulicznymi o wysokich właściwościach dynamicznych [1,2].
1.3. Kryteria oceny jakości sterowania
Ocena jakości sterowania pozycyjnego napędów maszyn hydraulicznych, opiera się na kryteriach oceny bezpośredniej odpowiedzi układu w czasie na skokową zmianę wartości sygnału zadającego. Z punktu praktycznej oceny jakości procesu pozycjonowania pożądana jest minimalizacja wartości trzech podstawowych parametrów:
> odchyłki ustalonej (statycznej) es,
> maksymalnej odchyłki przejściowej (przeregulowania) x
> czasu pozycjonowania tusl
3
Wyszukiwarka
Podobne podstrony:
instalacje066 1. WSTĘP 16 Rys. J.4. Schemat działania silnika skokowego o wirniku biernym: a), b), c
a. b. Rys. 9. Schematy połączeń silników prądu stałego; a- silnik obcowzbudny; b- silnik bocznikowy;
IMG&89 (2) Rys. 3.3. Schemat działania silnika czterosuwowego
2 (1913) 3. Podstawy teoretyczne Schemat zginania belki pokazano na rys. 2a Rys. 2. Schemat zginania
016 bmp 2.5. Mierniki elektrodynamiczne Rys. 2.5. Schemat ustroju elektrodynamicznego Moment napędow
Rys. 1. Schemat sterowania silnika indukcyjnego łącznikiem stycznikowym, przedstawiony w postaci sku
Rys. 2. Schemat sterowania silnika stycznikowym przełącznikiem kierunku wirowania [2] Bs - wyłącznik
LI L2 L3 LI L2 N Rys. 3. Schemat sterowania silnika stycznikowym przełącznikiem
Rys. 6. Schemat połączeń silników: a) bocznikowego, charakterystyka mechaniczna, b) szeregowego,
0 (4) 2 » 1 Rys. 2. Schemat wtryskarki: 1-lej zasypowy. 2-cytmder. 3-iSmak. 4 - płaszcz grzewczy.
Image44 Rys. Schemat strukturalny układu automatycznej regulacji prędkości silnika
skanuj0182 (5) o) <0k)Rys. 8.9. Schematy zaworów: a, b, c) zawory wzniosowe, d) klapa, e) membran
więcej podobnych podstron