016 bmp
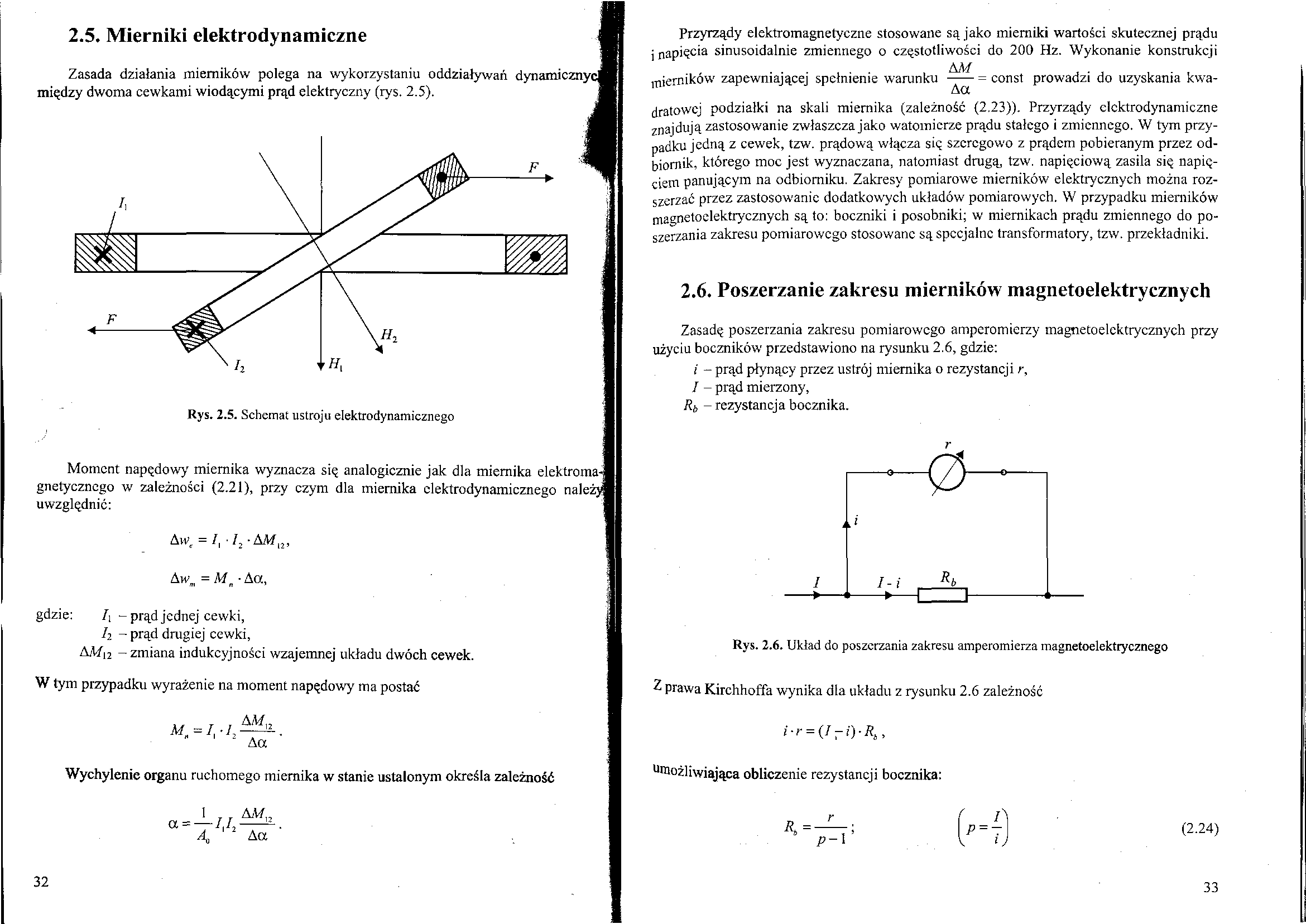
2.5. Mierniki elektrodynamiczne
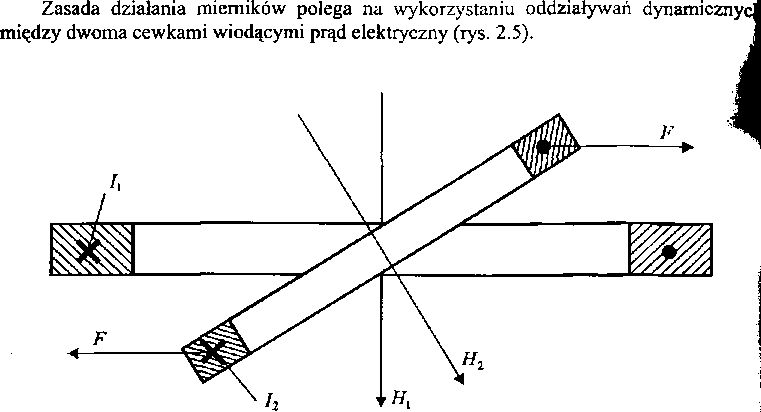
Rys. 2.5. Schemat ustroju elektrodynamicznego
Moment napędowy miernika wyznacza się analogicznie jak dla miernika elektroma-j gnetyczncgo w zależności (2.21), przy czym dla miernika elektrodynamicznego należy! uwzględnić: '
Awe = /, • /2 - AMn,
Awm = M n • Aa,
gdzie: I\ -prądjednej cewki,
h - prąd drugiej cewki,
AM 12 - zmiana indukcyjności wzajemnej układu dwóch cewek. W tym przypadku wyrażenie na moment napędowy ma postać
A^,2 ^
Aa
Wychylenie organu ruchomego miernika w stanie ustalonym określa zależność
a =

AMn
Aa
Przyrządy elektromagnetyczne stosowane są jako mierniki wartości skutecznej prądu i napięcia sinusoidalnie zmiennego o częstotliwości do 200 Hz. Wykonanie konstrukcji
mierników zapewniającej spełnienie warunku = const prowadzi do uzyskania kwa-
Aa
dratowej podziałki na skali miernika (zależność (2.23)). Przyrządy elektrodynamiczne znajdują zastosowanie zwłaszcza jako watomierze prądu stałego i zmiennego. W tym przypadku jedną z cewek, tzw. prądową włącza się szeregowo z prądem pobieranym przez odbiornik, którego moc jest wyznaczana, natomiast drugą, tzw. napięciową zasila się napięciem panującym na odbiorniku. Zakresy pomiarowa mierników elektrycznych można rozszerzać przez zastosowanie dodatkowych układów pomiarowych. W przypadku mierników magnetoelektrycznych są to: boczniki i posobniki; w miernikach prądu zmiennego do poszerzania zakresu pomiarowego stosowane są specjalne transformatory, tzw. przekładniki.
2.6. Poszerzanie zakresu mierników magnetoelektrycznych
Zasadę poszerzania zakresu pomiarowego amperomierzy magnetoelektrycznych przy użyciu boczników przedstawiono na rysunku 2.6, gdzie:
i - prąd płynący przez ustrój miernika o rezystancji r,
I - prąd mierzony,
Rb -rezystancjabocznika.
r
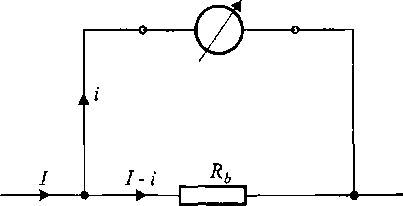
Rys. 2.6. Układ do poszerzania zakresu amperomierza magnetoelektrycznego
Z prawa Kirchhoffa wynika dla układu z rysunku 2.6 zależność i-r = (I-i)-Rb,
umożliwiająca obliczenie rezystancji bocznika:

(2.24)
33
Wyszukiwarka
Podobne podstrony:
014 bmp a A-A Rys. 2.3. Schemat ustroju magne toel ekt tyczne go Moment napędowy wytworzony przez pa
015 bmp Rys. 2.4. Schemat ustroju logometru Organ ruchomy osiąga położenie równowagi, gdy momenty M
Rys 6 6 bmp Do skraplacza Rys. 6-6. Schemat rotacyjnej sprężarki freonowej o wydajności 930,4 W
Rys. 7.6. Schematy ustrojów prostokątnych obciążanych symetrycznie i asymetrycznie (oznaczenia linią
a A-A r~-mzi Rys. 2.3. Schemat ustroju magne toel ekt tyczne go Moment napędowy wytworzony przez par
Rys. 2.4. Schemat ustroju logometru Organ ruchomy osiąga położenie równowagi, gdy momenty Af i M są
2 (1913) 3. Podstawy teoretyczne Schemat zginania belki pokazano na rys. 2a Rys. 2. Schemat zginania
Scan0068 Rys. 4.2. Schemat blokowy złożonego układu napędowego f 16] - charakterys
58 Artur GUZOWSKI, Andrzej SOBCZYK Rys. 4. Schemat ideowy hydrostatycznego układu napędowego pojazdu
1.2. Serworozdzielacz Rys. 1.3. Schemat serworozdzielacza; 1-silnik momentowy, 2-dysza, 3-suwak rozd
MNP1 50 Rys. 1. Schemat miernika natężenia pola elektromagnetycznego. □
Posługiwanie się miernikami elektrycznymi Rys. 8. Schemat układu do pomiaru napięcia prądu
023 bmp o-u„ R max R U» Rys. 3.6. Schemat elektryczny przetwornika potencjo metrycznego obciążonego
Image2�01 Rys. 3 Schemat pilota zdalnego aterowania Nony; Elektronik 115-1-K . ■ " fil
rys4 3 i © pary elektronowe (wiązanie atomowe) sieć AU (diamenty) c) Rys. 4.3. Schemat wiązania atom
Rys. 2. Schemat spawania elektrodą otuloną: 1 - rdzeń elektrody; 2 - otulina; 3 - osłona gazowa; 4 -
Schowek04 (12) Rys. 2. Schemat nadajnika Rys. 4. Schemat elektryczny modelu Rys. 3
więcej podobnych podstron