014
a
A-A
r~-
mzi
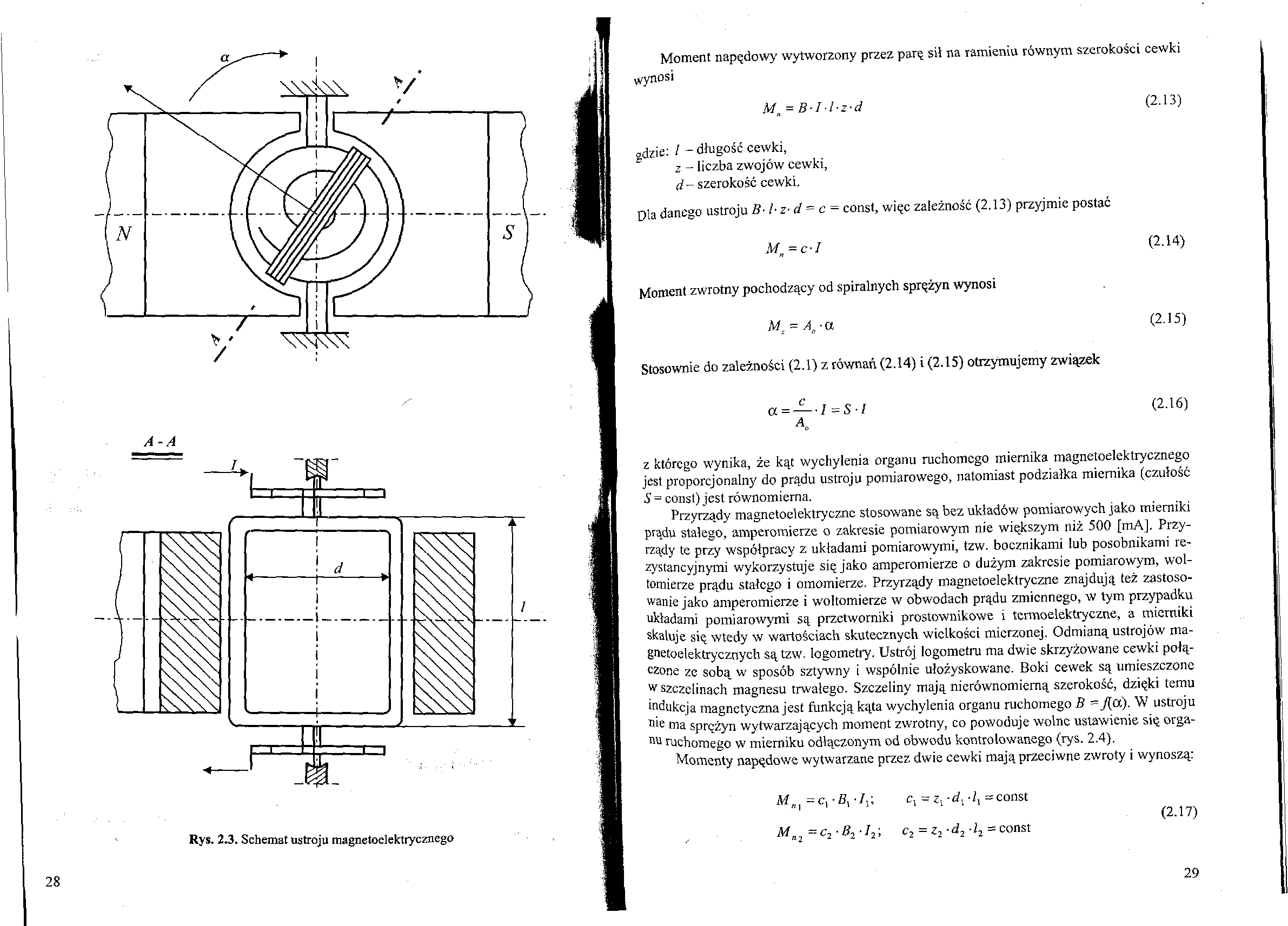
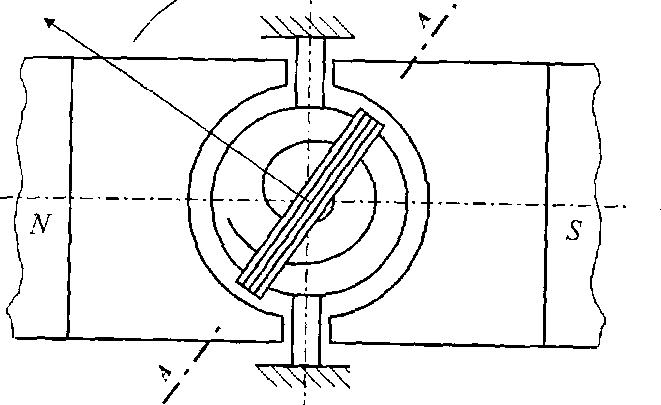
Rys. 2.3. Schemat ustroju magne toel ekt tyczne go
Moment napędowy wytworzony przez parę sił na ramieniu równym szerokości cewki wynosi
Mk= B'I-l-z-d (2.13)
gdzie: / - długość cewki,
z - liczba zwojów cewki, d- szerokość cewki.
Dla danego ustroju B- /• z- d = c = const, więc zależność (2.13) przyjmie postać
Mn=C‘I (2.14)
Moment zwrotny pochodzący od spiralnych sprężyn wynosi
Mz-A0-a (2.15)
Stosownie do zależności (2.1) z równań (2.14) i (2.15) otrzymujemy związek
a = — -I^SI (2.16)
A>
z którego wynika, że kąt wychylenia organu ruchomego miernika magnetoelektrycznego jest proporcjonalny do prądu ustroju pomiarowego, natomiast podziałka miernika (czułość S = const) jest równomierna.
Przyrządy magnetoelektrycznc stosowane są bez układów pomiarowych jako mierniki prądu stałego, amperomierze o zakresie pomiarowym nie większym niż 500 [mAJ. Przyrządy te przy współpracy z układami pomiarowymi, tzw. bocznikami lub posobnikami re-zystancyjnymi wykorzystuje się jako amperomierze o dużym zakresie pomiarowym, woltomierze prądu stałego i omomierze. Przyrządy mągnetoelektryczne znajdują też zastosowanie jako amperomierze i woltomierze w obwodach prądu zmiennego, w tym przypadku układami pomiarowymi są przetworniki prostownikowe i termoelektryczne, a mierniki skaluje się wtedy w wartościach skutecznych wielkości mierzonej. Odmianą ustrojów magneto e 1 ektryc znych są tzw. logometry. Ustrój logometru ma dwie skrzyżowane cewki połączone ze sobą w sposób sztywny i wspólnie ułożyskowane. Boki cewek są umieszczone w szczelinach magnesu trwałego. Szczeliny mają nierównomierną szerokość, dzięki temu indukcja magnetyczna jest funkcją kąta wychylenia organu ruchomego B W ustroju
uie ma sprężyn wytwarzających moment zwrotny, co powoduje wolne ustawienie się orga-m ruchomego w mierniku odłączonym od obwodu kontrolowanego (rys. 2.4).
Momenty napędowe wytwarzane przez dwie cewki mają przeciwne zwroty i wynoszą:
|
s: 3 II | |
|
Mni =c2 |
■ B2 ' 12 1 |
Cj = Z\‘d\‘lx — const cz= z2‘d2 -l2= const
(2.17)
29
Wyszukiwarka
Podobne podstrony:
014 bmp a A-A Rys. 2.3. Schemat ustroju magne toel ekt tyczne go Moment napędowy wytworzony przez pa
3 (189) ■R SI =- Rys. 2. Schemat obwodu prądu stałego do pomiaru natężenia prądu. pomiaru natężenia
Rys. 7.6. Schematy ustrojów prostokątnych obciążanych symetrycznie i asymetrycznie (oznaczenia linią
015 bmp Rys. 2.4. Schemat ustroju logometru Organ ruchomy osiąga położenie równowagi, gdy momenty M
Rys. 2.4. Schemat ustroju logometru Organ ruchomy osiąga położenie równowagi, gdy momenty Af i M są
016 bmp 2.5. Mierniki elektrodynamiczne Rys. 2.5. Schemat ustroju elektrodynamicznego Moment napędow
Rys. 1 Ideowy przekrój poprzeczny oraz schemat ustroju nośnego 3. Zakres stosow alności Uwarunkowani
Image147 U(t) Rys. Schemat blokowy układu opisanego równaniem stanu i równaniem wyjścia
Image148 Rys. Schemat blokowy układu gdy wektory U(t)=u(t) i Y(t)=y(t) są jednowymiarowe
Image156 Rys. Schemat blokowy układu gdy sygnały sterujące oddziały wuj ą także na sygnały wyjściowe
Image2�01 Rys. 3 Schemat pilota zdalnego aterowania Nony; Elektronik 115-1-K . ■ " fil
Image44 Rys. Schemat strukturalny układu automatycznej regulacji prędkości silnika
więcej podobnych podstron