5460978152
Ogniwa 1,2,3,4,5 są ustawione w pozycji swojego środkowego zakresu pracy.
Drugą wyróżnioną konfiguracją jest konfiguracja synchronizacji. Jej osiągnięcie jest sygnalizowane przez czujniki zamontowane w poszczególnych przegubach i kanały indeksujące koderów, odczytywane przez układ sterowania robota. Dla ogniw 1,2,4,5 czujniki zostały zamontowane tak, aby zachować zgodność z konfiguracją zerową. W przypadku ogniwa 3 położenie czujnika jest różne od położenia zerowego. Dokładne wartości położeń napędów ogniw w konfiguracji synchronizacji podano w dodatku A.
2.5 Transformacja napędowa osi robota
Sterownik robota zarówno mierzy, jak i zadaje pozycje i prędkości poszczególnych osi w tzw. przestrzeni napędowej, której współrzędne opisują położenia wałów poszczególnych silników. Istotne jest więc podanie sposobu przeniesienia napędu dla poszczególnych osi jak i równań wiążących położenia wałów silników Mi ze zmiennymi przegubowymi (/;.
Do napędu poszczególnych osi robota jak i do napędu mechanizmu zamykającego chwytak zastosowano silniki elektryczne prądu stałego z magnesem trwałym. Pomiar położenia wałów silników jest realizowany przy pomocy koderów przyrostowych o rozdzielczości D = 1024 impulsów na jeden obrót.
Wszystkie silniki napędowe, są wyposażone w przekładnie wielostopniowe o przełożeniach <?! = G2 = G3 = G6 = 94.37 i G4 = G5 = 43.3.
2.5.1 Rozwiązanie napędów ogniwa 1,2 i 3
Napęd ogniwa 1 (obrót kolumny) jest przenoszony przez przekładnię wielostopniową o przełożeniu Gj a następnie przez przekładnię jednostopniową o przełożeniu gdzie Z\ i Z2 oznacza ilość zębów dla poszczególnych kół przekładni jednostopniowej. Na rysunku 2.3 jest pokazany sposób przeniesienia napędu dla ogniwa 1 i 2. Równanie opisujące przeniesienie napędu jest następujące
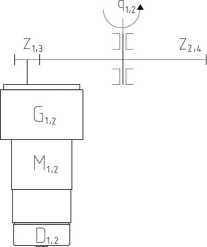
Rysunek 2.3: Struktura układu przeniesienia napędu ogniwa 1 i 2.
Wyszukiwarka
Podobne podstrony:
KSZTAŁCENIE W ZAKRESIE PRACY SOCJALNEJ W POLSCE 349 2006/200751. Standardy kształcenia określone są
Generalnie - dodatkowe przepływy finansowe są generowane przez wygospodarowanie środków (pozycja
Bez nazwy 5 Przy ścianie ustawiane są pojedyncze regały natomiast w środkowej części dwa regały są p
3 (2586) 2.8. Zawodnicy grup A i B są ustawieni w kole środkowym. Zawodnicy grup C i D z boku, przy
choroszy$1 241 lub podobnym ustawieniu obrabiarki. Podobne technologicznie w zakresie obróbki na rew
DSCN2783 ustawić w pozycji środkowej (neutralnej) przełącznik sposobu regulacji, a drążek środkowy 2
skanuj0060 (36) 28. Nieparzystymi gałęziami aorty brzusznej są: a. tt. nadnerczowe
horizontal Horizontal - poziomo BI, (B2 i B4), B3 są ustawione w sekwencji jeden po drugim (seąuenti
2 Zakres pracy socjalnej z osobami z niepełnosprawnością i ich rodzinami2.1 Zakres podmiotowy Osoba
img27 Operatory bitowe $a & $b AND Ustawiane są bity które są ustawione w obu zmiennych $a
więcej podobnych podstron