5460978155
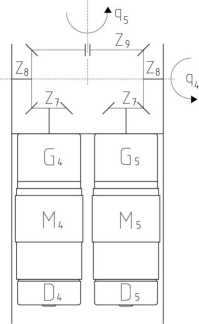
Rysunek 2.5: Struktura układu różnicowego napędzającego osie nadgarstka.
s5 = sin (<705 - 2ZqDG4 _ _ (2.44)
a transformacja odwrotna
q2 = Atan2(s2,C2). (2-45)
Warto zwrócić uwagę, że efektywniejszą obliczeniowo implementację transformacji prostych i odwrotnych uzyskuje się dzięki nadmiarowej reprezentacji kątów przegubowych qi jako par (Cj,Sj).
17
Wyszukiwarka
Podobne podstrony:
źródło prądowe i sterowane prądem , Rysunek 1: Zasilanie kolektorów układu różnicowego za pomocą
Image017 W przekroju poprzecznym struktury układu scalonego (rys. 1.13) można wyróżnić cztery warstw
Image39 Rys. Poglądowa struktura układu automatycznej regulacji
Image44 Rys. Schemat strukturalny układu automatycznej regulacji prędkości silnika
img014 Ponadto, w wielu strukturach układu nerwowego występują okresy, w których przejściowo są prod
img080 80 6.4. Rola i struktura układu kontrolnego skutek sprzężenia zwrotnego sygnał Y* dotrze do w
176 Ekonomia i Środowisko 1 (44) • 2013 Rysunek 1 Struktura rynku zarządzania wierzytelnościami wedł
IMG 8 099 (2) 98 5. Układ żclazo-węgiel5.2. Fazy i składniki strukturalne układu ielazo-węgiel
IMG$38 (3) Układ ruchowy • Struktury układu nerwowego odpowiedzialne za czynności ruchowe
Językoznawstwo ogólne zagadnienia do egzaminu Struktura układu komunikacyjnego w ujęciu K. Buhler
42 KWARTALNIK NAUK O PRZEDSIĘBIORSTWIE — 2016 / Rysunek 2 Struktura zobowiązań ogółem przedsiębiorst
Finansyzacja przedsiębiorstw przemysłowych w Polsce 39 Rysunek 1 Struktura aktywów przedsiębiorstw
więcej podobnych podstron