5662539630
Kolejnym sensorem wchodzącym w skład platformy pomiarowej jest skaner laserowy. Może być on montowany fabrycznie, bez możliwości zmiany konfiguracji urządzeń czy nawet kątów nachylenia skanera. Wówczas parametry obrotu i przesunięcia sensorów laserowych są stałe i zapisane w dokumentacji systemu. W innym przypadku, przesunięcia należy wyznaczyć za pomocą tachimetrów lub systemu LTS (Laser Tracking System) [Es-tler i in., 2002, Zhuang i in., 2003]. Macierz obrotu może być pozyskana poprzez wyznaczenie parametrów płaszczyzn wpasowanych w chmurę punktów, pomierzoną kalibrowanymi skanerami.
Elementy orientacji zewnętrznej kamer otrzymuje się w wyniku zastosowania jednej z dwóch procedur. Parametry położenia i obrotu dla danej kamery oblicza się na etapie przetwarzania danych, wskazując grupę korespondujących ze sobą punktów na zdjęciu i chmurze punktów. Można je również pozyskać na drodze pomiaru tachimetrem bądź systemem LTS, wspierane przez fotogrametryczne metody wyznaczenia kątów obrotu. Elementy orientacji wewnętrznej każdej z wykorzystanych kamer, dostarczane są przez producenta.
Kryterium późniejszego precyzyjnego połączenia danych, jest dokładna synchronizacja wykorzystanych sensorów. Zaimplementowane urządzenia mogą pracować z różną częstotliwością, a każde z nich musi być zestrojone zgodnie z czasem rejestracji GPS. Można wyróżnić trzy metody skoordynowania instrumentów. Pierwsza, oparta jest na pojedynczym sygnale odbiornika GPS. Jest to najłatwiejsze rozwiązanie, stosowane do urządzeń o bardzo niskiej częstotliwości poniżej 1Hz. Drugi sposób bazuje na znaczniku zdarzenia. Jest to bardziej powszechne rozwiązanie, stosowane do sensorów średniej częstotliwości (dziesiątki Herców). Najdokładniejsze wyniki
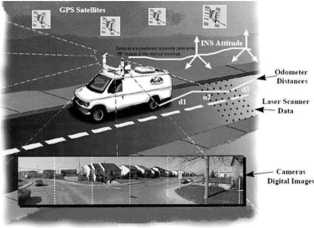
Rysunek 2.8. Schemat pracy mobilnej platformy pomiarowej.
Źródło: [El - Sheimy, 2005].
16
Wyszukiwarka
Podobne podstrony:
1. Elementem który nie wchodzi w skład formowania kadr jest: a)
DSC07819 (2) 9. Najdawniejszym fosfolipidom wchodzącym w skład surfakiamu płucnego jest: LA:) j plaz
05 05mPP Zadanie 5. (2 pkt) Żelazo wchodzi w skład hemoglobiny, która jest jednocześnie magazynem że
37603 lw2 9. Najważniejszym fosfolipidem wchodzącym w skład surfaktanlu płucnego j
[5] IZOENZYMY A NOWOTWORY 531 pod jednostkami wchodzącymi w skład homotetrameru A4 jest występo
DSCN2352 substancje powstałe w wyniku przestawienia kolejności aminokwasów wchodzących w skład
Autonomiczne samochody Udar - co to jest?® Skaner laserowy Zespółlaserów obraca się bardzo szybko wo
Filozofia Georga Wilhelma Friedricha Hegla 107 ich osiągnięcie”44. Oczywiście, nie jest to i nie moż
Skanuj0014 28 Lekcja trzecia i7. Un nie zawsze jest rodzajnikiem nieokreślonym, mo
IMG985 Kto to jest ochotnik, kto może być ochotnikiem? Osoba posiadająca obywatelstwo polskie, zdoln
Konfiguracja środowiskaZainstaluj platformę JavaTM2 na swoim komputerze! Może być zainstalowana na
Iterator o Jest uogólnieniem wskaźnika. ® Może być wskaźnikiem, ale równie dobrze może być obiektem,
HPIM6073 Do pomiaru oporów elementu oporowego może być użyty mostek Wbeatstone a, mostek kompensacyj
Wydrukowana kopia jakiejkolwiek części Księgi Jakości jest dokumentem nienadzorowanym i może być
Akcje 9Pojęcie akcji jest niejednoznaczne. Akcja może być rozumiana w trzech znaczeniach jako: 1)
więcej podobnych podstron