6781096723
Navigational systems employed on gas carriers while approaching terminals
Like in the IPPA system, the pilot can easily move on the bridge. The E-Sea Docking version has two GPS receivers that are mounted on the antenna deck with magnetic clip-on. In addition, the unit has an electronic heading sensor. Its two re-ceivers provide information on the position as well as the course. The respective accuracies are as fol-lows: course - 0.01°, ratę of tum - 0.02°/s, speed -0.02 knot. The RTK version has a rangę of about 15 Nm.

Rys. 5. Marimatech E-Sea System Rys. 5. System E-Sea
The operating system features numerous func-tions making the navigation easier for the pilot, such as: calculating and displaying the safe isobath depending on the height of the tide, collision avoi-dance and voyage planning.
The pilot can choose a chart option (chart of the passage or docking screen). Figurę 6 shows a chart in this system.
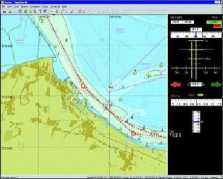
Rys. 6. Chart display in the ECDIS pilot system Rys. 6. Mapa elektroniczna w systemie ECDIS
PNS developed at Maritime University of Szczecin
The system devised at the Maritime University of Szczecin within an applied project of the Minis-tiy of Science and Higher Education (2].
This dedicated system is designed for navigation in conftned waters (pilot navigation). Its main features include:
- integration with the area,
- integration with the vessel,
- optimal information,
- optimal user interface,
- prediction and manoeuvring support.
The system, apart from standard images, offers special form of presentation for specific manoeu-vres in restricted areas, i.e.:
- shore visualization for mooring,
- fairway visualization for fairway passage ma-noeuvres.
The information presented on displays is optimal. The optimal user interface is specially built for pilots of large ships and ferry captains. The interface design has been bascd on simulation studies involving ship pilots and field tests conducted on the Świnoujście-Szczecin fairway. The system has a purpose-modifted chart in its own format contain-ing elements needed in pilot navigation, e.g. a fea-ture of constructing an accurate, safe dynamical isobath. The system can also make use of IHO-57 standard charts or other electronic charts.
The pilot arrives onboard with a suitcase weighing about 5 kg. The pilot uses a laptop with atouch 15' screen that can be freely carried across the bridge. The system uses DGPS positioning carried out by two correlated receivers with antennas mounted 0.5 m apart. They are mounted on magnets in an open space of the LNG carrier (e.g. bulwark). The accuracy of each waterplane point oscilates around ± 1.5 m.
The function of manoeuvre prediction in a 3-minute time span has a 15% accuracy of track covered. The portable version of the pilot navigation system built at the Maritime University of Szczecin is shown below (Fig. 7).

Fig. 7. Pilot navigation system (portable version) built at the Maritime University of Szczecin
Rys. 7. Pilotowy system nawigacyjny (wersja przenośna) zbudowany w Akademii Morskiej w Szczecinie
49
Zeszyty Naukowe 20(92)
Wyszukiwarka
Podobne podstrony:
Navigational systems employed on gas carriers while approaching terminals - determ
Navigational systems employed on gas carriers while approaching terminals Navigational systems emplo
8a (31) Ready access to the hot-gas-path components via two manholes in the combustion chamber great
106 ligands on osteoblastic cells, we evaluated celi survival in the MC3T3-E1 celi linę following a
15128 P40C 4 TECHNICAL DESCRIPTION The P-40 fighter piane could be found on any battlefield of World
00012 ?3e44d5c893c8e6750f55120a2c44d2 11 An Overview and Perspective on Control Charting empirical
Stanowisko nr 3.GARMIN GPS III Plus Personal Navigator systemu GPS Opis układu pomiarowego. Ćwiczeni
Stanisław Gucma, Maciej Gucma Navigational Systems supporting berthing manoeuvres (Docking System) T
Logistyka - nauka of this new approach is the creation of a cohesive transport system in the Europea
The CPTWD system has been employed near Parma (Italy) in the geotechnical surveys for the project of
Employee Satisfaction Survey as HRM Audit Method - Case Study Based on X Firm 133 participate in the
P1090719 Book system may be esamined on three Ievels: i. when we take into aćcount thesieps in the c
The influence of naproxen supplementation on nitrergic neurons In the enteric newous system (ENS) in
więcej podobnych podstron