7928718584
316 Piotr TompaisKi, Piotr
Pierwszy etap analizy danych TLS polegał na filtracji punktów o nieprawidłowy położeniu (ghostpoints) oraz odrzuceniu tych o bardzo niskiej wartości intensywno ści odbicia (intensity). W kolejnych etapach następował eksport do formatu ASCII w celu zastosowania oprogramowania Terrascan (Terrasolid Ltd.) służącego przypj saniu najniżej leżących punktów do klasy gruntu (format danych LAS). Od teg0 poziomu następowała dalsza klasyfikacja chmury punktów do określonych zakresów wysokości (np. dla pozyskania 4 cm grubości wycinka pierśnicy: +1,28 h- +l,32m) Tak sklasyfikowane punkty były znowu eksportowane do formatu ASCII w celu wykorzystania automatycznego algorytmu określającego pole przekroju drzewa [Kozioł i Wężyk 2007, Wężyk i in. 2007]. W toku prac nad jego udoskonalaniem dokonano modyfikacji polegającej na zmianie metody pomiaru drzew skanowanych tylko z jednego stanowiska skanera [Tompalski i Kozioł 2008]. Algorytm jest w stanie analizować jednak pole przekroju drzewa na podstawie dowolnej kombinacji punktów pochodzących z poszczególnych stanowisk (ryc. 2).
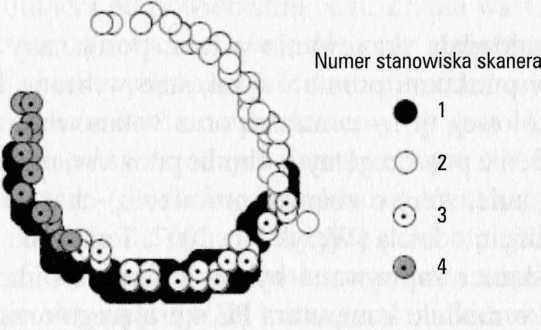
Ryc. 2. Przekrój przez fragment chmury punktów (slice) w obrębie pnia drzewa na wysokości 1,3 m od gruntu. Symbole punktów oznaczają poszczególne stanowiska skanera
3. Wyniki
Skanowanie z kilku stanowisk powierzchni kołowej ma niewątpliwie zarówno swoje zalety, jak i wady. Większa liczba stanowisk skutkuje zwiększeniem prawdopodobieństwa uzyskania informacji (punktów) na temat poszczególnych fragmentów skanowanego drzewa. Jednocześnie jednak większa liczba stanowisk łączy się ze znacznym wzrostem czasu pracy, który zamiast kilkunastu minut może wydłużyć się nawet do 90 min. (wraz z przemieszczaniem urządzenia, odpowiednim doborem lokalizacji dla skanera oraz sfer wiążących poszczególne skany). Skanowanie z kilku pozycji powoduje również liniowy przyrost danych (ok. 140 MB na jeden skan) oraz zwiększenie nakładów czasowych i finansowych na zarządzanie nimi (integracja, pasowanie na sferach oraz ich przetworzenie np. filtrację, eksport etc). Optymalizacja wyboru liczby stanowisk skanera musi być poparta konkretnymi wynikami, co moz-
Wyszukiwarka
Podobne podstrony:
18 Część T: Obiekt — zdarzenieAnaliza wyników Pierwszy etap analizy danych to ocena ilościowa uzyska
etap 3 - analiza danych i opracowanie raportu z badania. 4.1 Projektowanie
134 Część ITT: Warunki i sytuacje. Pierwszy etap analizy uzyskanych zeznań to ocena ilościowa. W jej
WYBRANE ZAGADNIENIA EWOLUCJI BEZPIECZEŃSTWA 19 Pierwszy etap ewolucji bezpieczeństwa rozpoczął się n
Kluge: Skrypt do przedmiotu „Analiza danych” (rok studiów 2006/2007) Analizy danych wykorzystywane s
CCF20071208�003 3. Pierwszy etap konstrukcji bilansu pro forma na rok 2007: Tabela. 4. Bilans pro fo
88 (140) ADAM MIL ■^mmmmmm Pierwszy etap prac - Czernickie trakcie remontu na placu stoczni SMW. Okr
156 Katarzyna Wojtacka-Pawlak Pierwszy etap rozwoju i-bankowości w Polsce przypadał na lata 1995-199
3. Analiza danych Ze względu na dużą liczbę informacji, które zdobyto podczas przeprowadzonych wywia
więcej podobnych podstron