8181341963
152
PKZMłLAD TECHNICZNY
1908.
Urót .1 "Ar-vs jv,ecHANi!;i
w języku wektorów.
Przez Ludwika Silbersteina.
^Ciąg dalszy do str. 129 w Aś 10 r. b.1.
Związki kinematyczne.
Aby określić chwilowe położenie obracającej się bryły względem układu 0, t. j. względem układu „nieruchomego*, wprowadza się zazwyczaj, w wypadku ogólnym trzech stopni swobody, trzy powszechnie znano kąty Euler'a: 0, <|>, cp. Składowe prędkości obrotowej bryły pv pv p3 wyrażają się wów- ;
(46),

czas przez liniowe funkcyo pochodnych 0, »{>, <p o współczynnikach zależnych od samych 0, <]>, <p. w sposób dość prosty zresztą (por. wyżej cytowane dzieła). Związki to noszą nazwę równań kinematycznych Euler a.
Kąty Eulkka są bardzo dogodnymi parametrami, szczególniej, że jest icli trzy, a więc tyle, ile obracająca się bryła posiada stopni swobody. Wybór ich opiera się jednak na pewnem uprzywilejowaniu jednej z osi względem dwóch innych; innemi słowy, kąty 0. <p bynajmniej nie są równorzędne sobie co do znaczenia geometrycznego; dzięki tomu zaś znika sy metry a wzorów.
Przy wektorowym sposobie przedstawienia rzeczy, związki kinematyczne są już właściwie zawarte w równaniu (22), zastosowanem do dowolnego wektora w związanego nierozerwalnie z bryłą (dw^dt — 0), a więc w równaniu
• dli) T/
W = = Vpw .
dt *
Możemy w niem położyć za w wektor r odpowiadający dowolnemu punktowi bryły, a więc napisać
r = Vpr.
Możemy też położyć kolejno lv = JO,, JO:i, przy znaczeniu
symbolów powyżej objaśnionem. YVówczas otrzymamy trzy równania różniczkowe woktorowe:
JCX = Vpj[' 1 JL\ = Vpj02
*•■3 = T> -*--3
które możemy uważać jako wyraz związków kinematycznych. W tym układzie równań rola wszystkich trzech osi głównych jest jednakowa. Mamy tu wprawdzie trzy wektory jednostkowe, równoważne sześciu skalarom, podczas gdy bryła posiada trzy tylko stopnie swobody; innemi słowy, jcXy jo.iy joz nie stanowią zmiennych wzajemnie niezależnych, jak 0, «[», <p; lecz zato żadna z osi ruchomych nie jest uprzywilejowana.
Przypomnijmy sobie, że wektory joX) jc2, JO3 są nietyl-ko jednostkowe, lecz wzajemnie do siebie prostopadłe, tak iż oprócz
jl\2 — jr22 = jcz2 = 1, mamy jeszcze trzy warunki skalarne:
JO JO z — JO 3 mM* j —- JO j JO 2 — 0 ,
0
a więc istotnie tylko trzy wzajemnie niezależno parametry skalarne. Możemy jednak pozostawić aolt J02i JCZ w związkach kinematycznych, pamiętając o tych warunkach skalarnych, acz nio wyzyskując ich z góry i raz na zawsze.
I
W związkach (40) prędkości JOx i t. d. są wyrażone przez prędkość obrotową bryły p i przez same JOx i t. d. Opierając się na tych związkach, możemy toż wyrazić natychmiast składowe px i t. d. wektora p wzdłuż osi ruchomych przez
prędkości JOx etc. i przez same wektory JOx etc. Istotnie mnożąc skalarnie ostatnie równanie (46) przez JO.,, otrzymamy:
J02 JC 3 = JO., V p jo 3 = pVjP3J02] lecz V JO2 J02 =— JOx, pjox=px,
a więc: J02 J03 = — pv.
Różniczkując zresztą JC2 JCj -= 0 ze względu na czas, mamy • • •
JOr, J03 = ' — JO■, J03, a więc px = J02 jv3. Podobne dwa równania wynikają stąd przez cykliczne przestawienie wskaźników. Otrzymamy tedy żądane związki w postaci
Pi —
P i — JC\
f
p3 = JDX JC,
w której żadna z osi nie jest wyróżniona, czyli uprzywilejo-, wana.
• Nie chciałbym przez to powiedzieć, że jox, jo2, JOz będą : dla celów specyalnie rachunkowych również dogodne jak pa-| rametry O, '{>, cp.
I
Całka liniowa i curl wektora, ilustrowane na przykładzie
poruszającej się bryły.
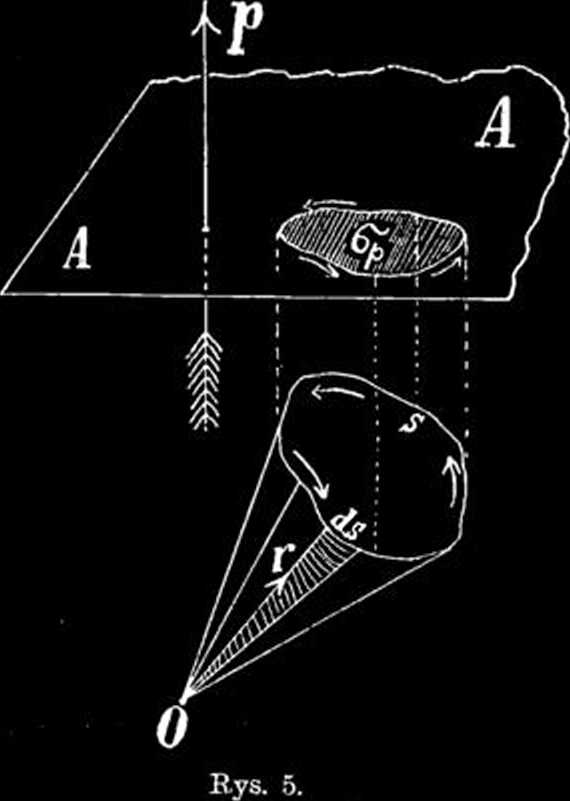
Pomyślmy sobie dowolny obwód, czyli krzywą zamkniętą *• przebiegającą w bryle; niechaj d% będzie jej elementem co do długości i kierunku. Oznaczmy znowu przez 1? prędkość wypadkową dowolnego punktu bryły względem O i rozważmy całkę liniową wektora V wzdłuż obwodu s:
1 = fv d».
Jeżeli bryła obraca się naokoło punktu stałego (Z = O, mamy V = Vpry gdzie p jest chwilową prędkością obrotową; w ogólniejszym wypadku bryła może też posiadać prędkość postęjtoiuą w dowowolnyra kierunku, powiedzmy r0; wówczas j będzie
V = v0 -f- Vpry
gdzie wektor t?0 jest jednakowy dla wszystkich punktów bryły, t. j. niezależny od r. Przy sługuje on całej bryle, podobnie jak wektor p.
Mamy
v ds = r0 ds + ds. Vpr = v0 ds -f- p Vrds\ j lecz /r0 ds = v0J’d% = 0,
1 albowiem całka obejmuje krzywą zamkniętą, czyli zamknięty w sobie łańcuch wektorów elementarnych ds\ ponieważ zaś
wektor p jest jednakowy dla wszystkich punktów bryły, możemy umieścić go przed znakiem całki; otrzymamy przoto
I = pWP, gdzie §^ = /Vrds, czyli I — pWPi
gdzie Wp oznacza składową wektora JW wzdłuż chwilowej osi obrotu.
Natężenie wektora Vrds nie jest niczem innem jak po-dwójnem polem trójkąta Or ds (rys. 5); .1 Wp jest więc polem
Wyszukiwarka
Podobne podstrony:
13969 IMAG0928 152 Rozdział 8. Techniki zapień czynności nauczycietokśch » ***** pytanie. Może też u
27 (621) ar* VS Sw\ , i histeryczna obejmuje ciąg zdarzeń, dzięki którym pacjent może się usunąć ze
DSC00044 ZJIr2# karkowMo lub k-u, **2+ “ Kr#t°wln« (t>ur»ot ar *^ro-occ/p/fa//s
scan0027 3 152 Analiza technicznaInne sytuacje, w których ważna jest liczba otwartych kontraktów Ist
DSC01160 Inn* techniki kodowano <cdcv,ar e za comocą migotano * ty*c -eo*" r>rs tr gpc&am
$ * MM TECHNIK CHŁODNICTWA I KLIMATYZACJI I Ąr j , TECHNIK ” Li T TECHNIK
CCI20130725�150 152 9. Rozwiązania techniczne i systemy technologiczne bioreaktorów stosowanych... n
Technika Moreno - wymaga od osób badanych wskazania dowolnej lub określonej przez badacza liczby osó
>v 7VrManarai -o
więcej podobnych podstron