8331764147
Jako czujnik, którego charakterystykę wykonano wybrano transduktorowy czujnik (ang. Flux - Gate). Jego zasadę działania oraz parametry przedstawiono w rozdziale II.
II. Zasada działania czujnika transduktorowego (ang. FIux - gate)
Czujnik transduktorowy jest obecnie podstawowym narzędziem do pomiaru słabych pól magnetycznych. Opatentowany został w 1931 roku [4], a w 1958 roku na pokładzie Sputnika 3 znalazł się w kosmosie.
Przykładowa budowa czujnika transduktorowego pokazana została na rysunku 3. Rdzeń ferromagnetyczny wykonany w postaci paska (rysunek 3a lub pierścienia rysunek 3b) jest magnesowany do chwili nasycenia (pole Hm). Jeżeli zewnętrzne pole jest równe zero (Hx=0) to obydwie połówki napięcia wtórnego e2’=e2 ” są identyczne (są sobie równe). Napięcie wtórne składa się tylko ze składowych nieparzystych.
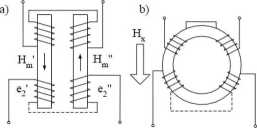
Rys. 3. Rozwiązania konstrukcyjne czujnika transduktorowego [4]
Przy założeniu, że napięcie magnesujące ma kształt trójkąta wówczas napięcie wtórne dla Hx=0 [4, 5, 6] można wyrazić równaniem:
(1-2)
16 . TT f . Hs 3;r^ f /0 H 3tt.^
+ — zfs^ I sin —I • I cos(3ot - —) I +....
odpowiednio:
f, z, s - częstotliwość, liczba zwojów oraz powierzchnia (podobnie jak dla czujnika indukcyjnego)
Hs, Hc- parametry pętli histerezy - odpowiednio natężenie nasycenia oraz natężenie koercji.
Jeżeli pojawi się zewnętrzne pole magnetyczne Hx [4] wówczas punkt pracy na charakterystyce magnesowania ulegnie przesunięciu o wartość Hx. Obydwie połówki okresu napięcia wtórnego będą się od siebie różniły, co spowoduje pojawienie się w sygnale e? harmonicznych parzystych. Napięcia wyjściowe można opisać równaniami [4]:
122
Wyszukiwarka
Podobne podstrony:
2.2.2 Zdefiniowanie materiału Jako materiał, z którego został wykonany kubek przyjęto stal nierdzewn
skanowanie0037 2 82 Rys. 21.1. Siły działające na równi pochyłej 21.2. Jako czujnik stosujemy fotobr
DSC00081 (26) Przyrządy stosowane jako czujniki półprzewodnikowych lezystoły kondensatory złącza Sch
P1011354 Antropometria Antropometria -studium człowieka widzianego jako podmiot/obiekt, którego char
3 Podstawy Automatyki - 42.2 Czujniki indukcyjne Czujniki indukcyjne jako czujniki zbliżeniowe reagu
■ pomiar zdalne, które jako czujniki pomiarowe wykorzystują np.: o pirometry o kamery
Ćwiczenie 2 Zaprezentuj krótką charakterystykę jednej z wybranych metod zarządzania. Sposób wykonani
Zadanie 6. Która z wymienionych maszyn elektrycznych jest wykorzystywana jako czujnik prędkości
DSCN0527 (Large) IU SILNIKI O KOMUTACJI BEZZE8TYKOWEJ 409 Jeżeli jako czujniki położenia wirnika zos
IMG927 itp. Promszko wespół z Sz. Syrkusem zaprojektował teatr symultaniczny, którego makietę wykona
Nowela jako gatunek literacki. Analizując celowo wybrane utwory omów ewolucję noweli. Uwzględnij kon
więcej podobnych podstron